


Research Progress of Masticatory Simulator Based on the Principle of Oral Mastication
-
摘要: 咀嚼模拟器是指模仿人类口腔生理结构、咀嚼运动系统以及咀嚼功能的机械装置。该类型设备因不受伦理、时间、环境的影响,能够为揭示食物的口腔破碎、食团重组及风味成分释放的动力学过程提供直接的实验验证。本文主要对口腔生理及其模拟方法做出简单介绍,为咀嚼模拟器的构建提供有效的科学依据和参考因素。同时在口腔咀嚼原理基础上对应用于各领域咀嚼模拟器的设计原理和思路、仪器测试方法进行介绍并基于设备的应用重点对现有咀嚼模拟器进行初步归类,以方便不同研究领域研究者对咀嚼模拟器进行选择和应用。Abstract: Masticatory simulator refers to a mechanical device that mimics the physiological structure of human oral cavity, chewing control and functions. A masticatory simulation device has advantages of not being affected by ethics, time, or environment, and is capable of providing direct experimental verification of the dynamics of food's oral breakdown, bolus reorganization, and the release of flavor compounds. This article mainly introduces oral physiology and its simulation methods, so as to provide effective scientific basis and reference factors for the construction of masticatory simulator. At the same time, based on the principle of oral chewing, this article introduces the design principle, ideas and instrument test methods of masticatory simulator equipment applied in various fields, and focuses on the preliminary classification of existing masticatory simulator devices based on the application of equipment. It is hoped to facilitate the selection and application of masticatory simulator for researchers in different research fields.
-
Keywords:
- masticatory simulator /
- oral physiology /
- mastication /
- food texture /
- flavor release /
- food oral processing
-
近年来,随着食品口腔加工与食品感官科学研究的深入,咀嚼模拟器成为人们的关注重点之一。以口腔生理构成及咀嚼原理为基础,咀嚼模拟器为解决口腔密闭环境难以进行跟踪观察、感官实验志愿者较难客观评价实验结果且难以控制自身咀嚼力度,以及咀嚼障碍人群测试困难等问题提供了较好的解决方案。初步实现在体外对食物口腔行为和结构破坏进行模拟[1]。该设计可用于不同的研究领域。对于食品科学研究,咀嚼模拟器主要用于以下几个方面的研究需求:
用于跟踪并量化描述食品在口腔中的结构破坏与破碎过程;研究在口腔加工条件下,食物风味小分子释放的动力学特征,以及受口腔条件的影响;观察食团的形成并测量其性质的变化;通过调节口腔生理和控制条件,模拟特殊人群的口腔咀嚼能力,并提供特殊食品设计的基础数据;利用食品口腔结构破坏及风味释放的数据,为食品感官及口腔体验提供实验室预测分析。
本文在人体口腔生理结构基础上对各领域咀嚼模拟器的构建和测试进行简要分析,为该类型设备的构建提供了可参考的口腔生理结构要求、当前可应用于装置的硬件结构和软件模拟系统等,对未来进行该领域设备研究的研究人员具有一定的综合性参考作用。目前对咀嚼运动的模拟机械暂时没有统一的名称,因而为体现相关机械设备对人嘴功能的仿真效果,本文将该类型设备统称为咀嚼模拟器。
1. 口腔生理及体外模拟方法
咀嚼模拟器对人体口腔生理模仿是实现其功能的基础,且针对不同用途咀嚼模拟器对口腔生理的模仿角度及完整度有较大差异[2],口腔生理研究为体外模拟奠定了相应基础。目前已知咀嚼模拟器对口腔生理的模仿主要集中在对口腔或咀嚼过程中各器官组成对食物(食团)所施加的力的模拟上[3]。较好地模拟口腔生理是咀嚼装置硬件设计的基本目标。
1.1 口腔
口腔主要是指与口相连接部分到咽峡之前部分的空腔状结构,通常被认为是人体消化系统的起始部位。口腔对于人类的进食及语言等功能是必不可少的器官,但受到不同性别、地域、人种、年龄大小差异及口腔结构的复杂性影响[4],很难做到对口腔进行统一化的体外设计和模拟[5]。因此对口腔体外模拟的重点主要放在口腔的包裹能力及口腔容积上。
早期的医用体外咀嚼模拟装置包裹能力较差,较难保证模拟过程中咀嚼环境的温度、pH及其它控制因素,目前大多咀嚼模拟器采用不同材料制作的咀嚼室结构代替口腔的空腔结构,在保证清洁度的基础上模拟咀嚼过程的真实性[2]。咀嚼室在满足口腔容积大小合适、具有一定的承重能力、具有一定防水性能基础上设计为矩形或圆柱形结构。
人体口腔容积测试可采用含水测试法进行测量[6],具体测试方法如下:于一次性水杯中准备150 mL饮用水,让受试者尽可能多的含住准备好的水,保证过程中不吞咽。然后测定杯中剩余的水量,与初始杯中含水量的差值即为受试者最大口腔容积含量。由测试结果可知,口腔健康的男性可含水(30.5±10.1)g,女性大致为(25.2±8.1)g [7]。但老年人或患有口腔疾病人群的口腔在不同情况下容积不同,无法做出平均化处理,同时考虑到不同状态食物对于口腔容积的影响很大[4,6],口腔容积的大小需要按照具体情况进行分析。
根据咀嚼模拟器的用途不同,体外模拟咀嚼室大小也有所差异。较为特殊的是用于研究气体释放与咀嚼相关性模拟器咀嚼室大小通常要将鼻腔容积纳入咀嚼室中。
1.2 牙齿
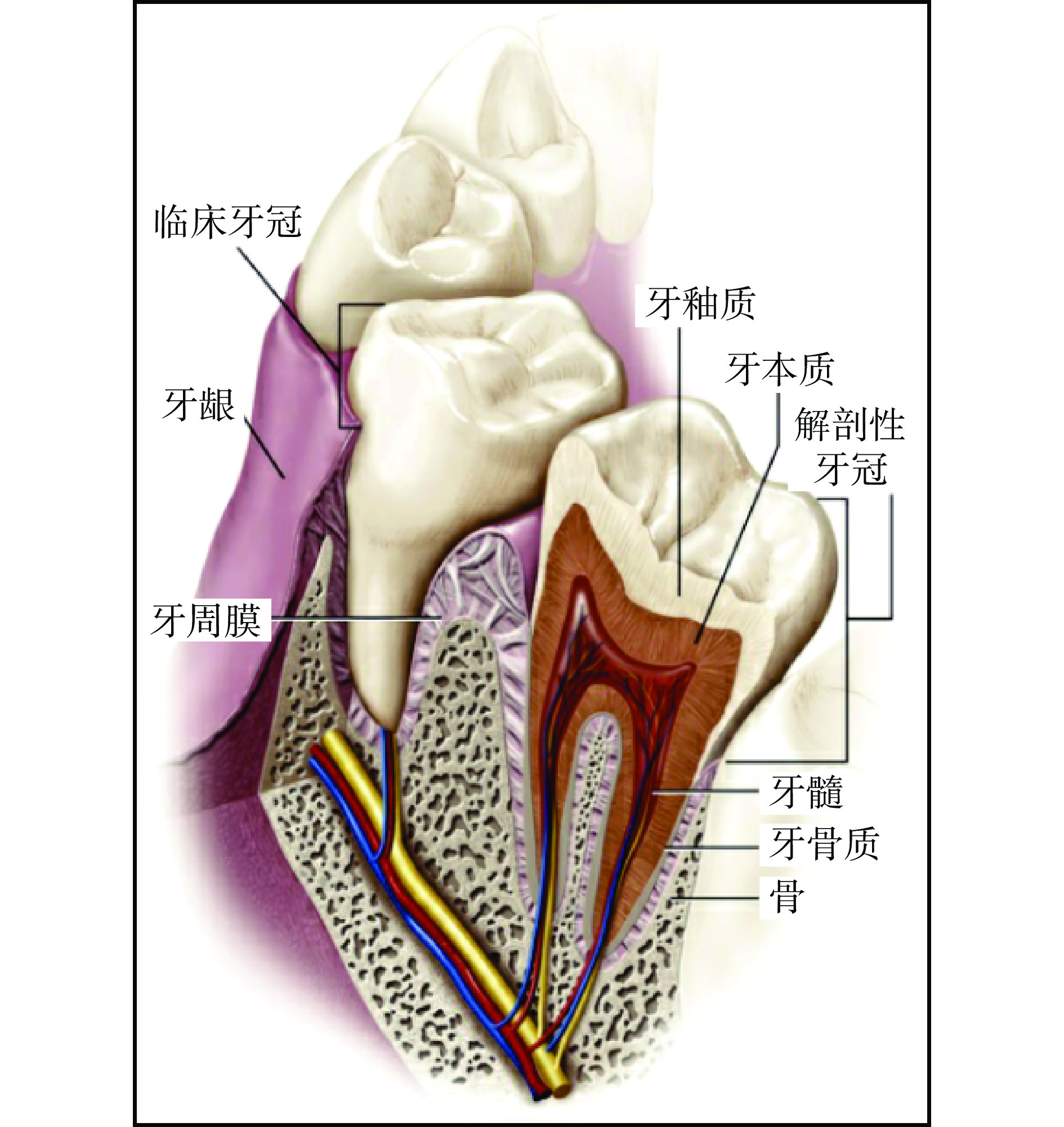
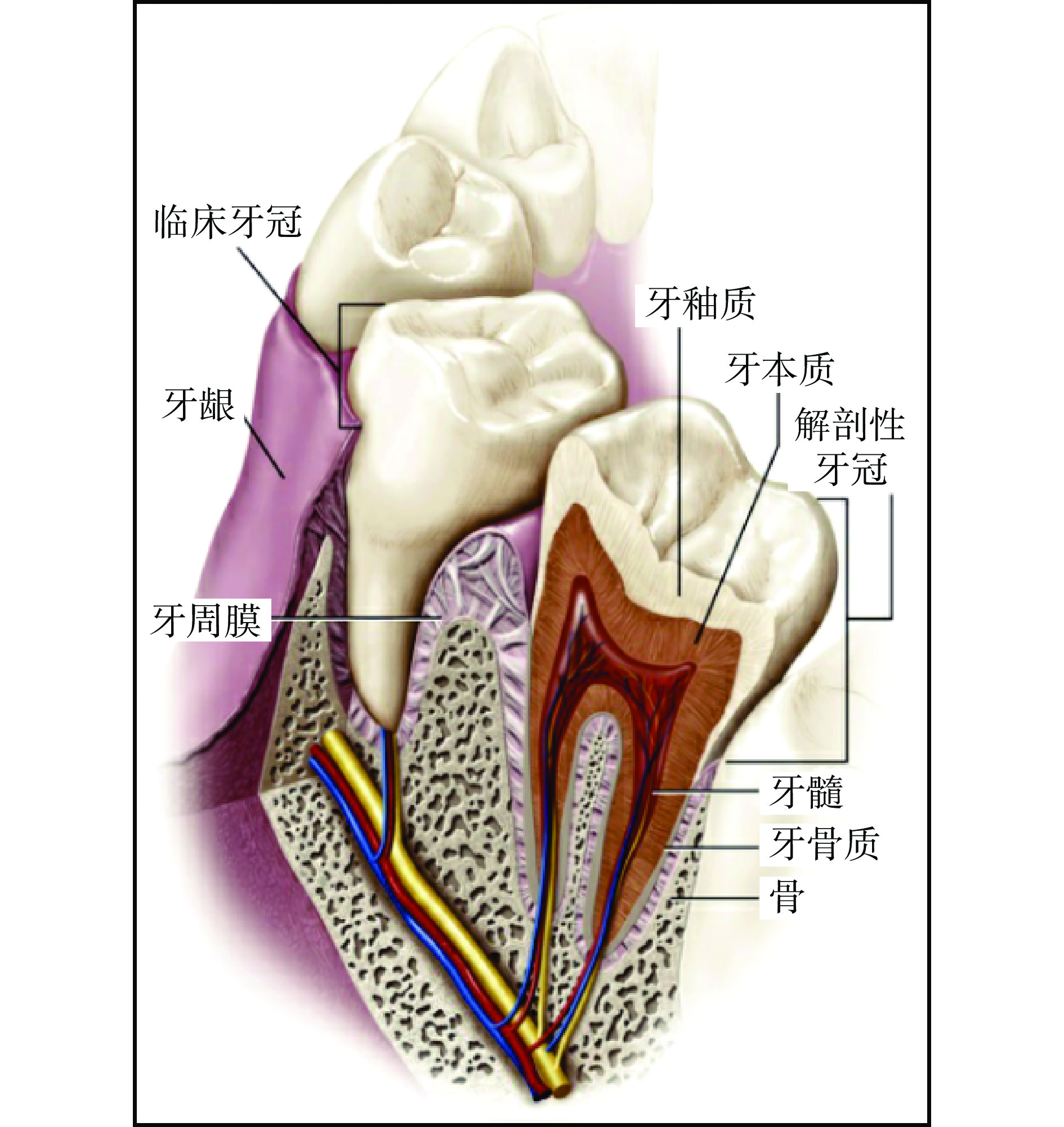
牙齿占据口腔中约20%的表面积,与食物的破碎过程紧密相关,牙齿主要由牙本质构成,其特殊成分让牙本质难以被破坏,一方面为牙齿提供了良好的硬度,另一方面可作为一种生物学或是法医学的鉴定手段。图1为牙齿的结构示意图。在牙冠、牙根部分外包裹有牙釉质和牙骨质,牙齿中间部分称为牙髓腔,内部含有大量神经与血管。牙齿与下颌之间的链接由牙骨质、牙槽骨、牙周膜组成的支撑装置提供[8]。牙齿特殊结构赋予其的硬度是牙齿体外模拟中必须注重的因素之一,其坚硬程度及形状对模拟咀嚼中食物的破碎情况起到了极为重要的作用。
![]()
正常情况下,成人有32颗牙齿,包括门牙、尖牙、前磨牙和磨牙。不同牙齿在食物破碎中所起功能也有所差异,其中门牙用于食物的切割,尖牙用于撕裂食物,前磨牙可帮助尖牙进行食物的撕裂破碎,磨牙在咀嚼中起到了最主要的作用[4]。
不同食物的物理性质对人类牙齿自古猿人时期至今的演变具有很大的影响[9],将牙齿研究与食物的破碎相联系是进行模拟的基础。目前,体外咀嚼系统中对牙齿的模拟主要目标为重现牙齿在咀嚼过程中与食物的接触面积、对食物所施加的不同力以及将食物维持在牙齿模型表面的停留能力[9]。牙齿的体外模拟应当和破碎食物质地进行综合考虑,食物的刚度、强度、韧性和可塑性都是牙齿体外模拟的重要参考标准。
1.3 舌头
舌由骨骼肌组成,因其独特的纵向、横向及垂直三方向肌肉结构,可实现在口腔内的灵活运动[10]。在咀嚼过程中舌头通过大脑控制可实现对食物的位置迁移、食团组成及类型分类等步骤[11]。同时舌头也是食物触觉和味觉形成的重要器官。
在咀嚼过程中,舌头实现了对食块与唾液之间的混合,促进食团形成。同时舌头根据食物破碎程度不同对食块进行分类,运送至不同牙齿或是口腔位置,对破碎程度及唾液混合程度达到吞咽要求的食团进行短暂的堆积[12]。充分咀嚼后,舌头将所有食团运送至咽部,准备吞咽[13]。咀嚼过程中舌头保持持续运动状态,仅在吞咽时有短暂停顿,舌头在咀嚼和吞咽过程中起到了很大的作用[14]。
舌头对食物的推送和聚集主要通过舌压形式体现,体外舌头模拟基于重现体内舌压变化及上述的食团聚集能力。Kennedy等[15]利用微型压力传感器对志愿者吞咽水时的舌压做了简单测试,结果显示吞咽过程中上颚前段压力最大,中部压力最小,但不同受试者之间结果差异较大,这对舌压的体外模拟是一较大的挑战。
1.4 唾液
唾液是人体内成分最复杂的液体之一,主要由腮腺、舌下腺、下颌下腺三对唾液腺及许多小唾液腺分泌。当口腔受到一定刺激时,每个腺体在刺激下的分泌比例会受刺激方式的影响[16]。唾液可通过润湿食物来帮助食团的形成,促进吞咽,可以保护口腔黏膜免受机械的损伤,并通过α-淀粉酶以及其他酶的存在对食物起到初步消化的作用。水占唾液所有成分中的99%以上,其余可分为有机成分及无机成分两类[17]。
为模拟人体内口腔真实情况,目前体外实验大多采用人工唾液作为体外加工的基本环境。人工唾液的主要成分含有氯化钙、氯化钾、氯化钠、氯化镁等,尽可能还原人体内真实唾液离子组成;唾液粘稠度由增稠剂进行模拟;加入缓冲盐调节人工唾液的pH和真实唾液环境相接近[18]。人工唾液为体外咀嚼提供了近似真实口腔理化环境的基础,其离子环境、可控pH大小、易控制温度的水域条件是咀嚼模拟的必要条件,也是仿真程度的重要参考标准。此外,上述唾液中酶和理化条件等对食物的风味释放也具有一定影响[4],这对体外模拟中的风味采集分析也有很重要的参考价值。除咀嚼模拟中的应用外,人工唾液也被广泛应用于医疗领域,汪声明等[19]近期研究发现将人工唾液和西维美林综合可用于治疗口腔粘膜破损病症。
2. 咀嚼动力系统
咀嚼动力系统中涉及的要素是体外模拟咀嚼过程中主要的软件模拟目标,如果说口腔生理是咀嚼模拟装置的硬件部分,那动力系统中的动力参数则是装置中的软件精华,是装置的大脑。
2.1 咀嚼过程简介
食品的口腔加工阶段,主要可以分为以下几个步骤:摄取食物和第一阶段的运输:首先经过嘴唇将食物从体外进食到口腔内部,经过门牙部分后,运输的工具是人的面部肌肉以及舌头的各种运动,第一部分的运输也就是指在运输工具的作用下,食物从入口到被运输到磨牙位置;咀嚼:在磨牙的作用下经过第一次运输的食物被破碎,在这期间,食物会和口腔内的唾液相结合,此时唾液除了保持牙齿完整性和提供抗菌活性外,更重要的是帮助润滑和保护食物颗粒的移动,食物缓冲,增加风味小分子的扩散等[4];第二阶段运输:在上一步食物和唾液形成食团后,食物就已经具备了下咽的条件,此时食团会被运输到口腔后部的口咽部,特殊的是咀嚼和第二部分的运输可以同时进行;吞咽:吞咽是当食团满足了吞咽条件后,由大脑发出吞咽指示,吞咽启动的具体条件尚不明确,但一般认为应包括颗粒的大小、黏度的大小、硬度的大小等条件[5]。
2.2 下颚运动
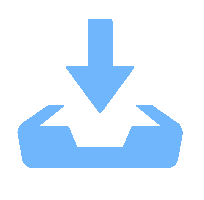
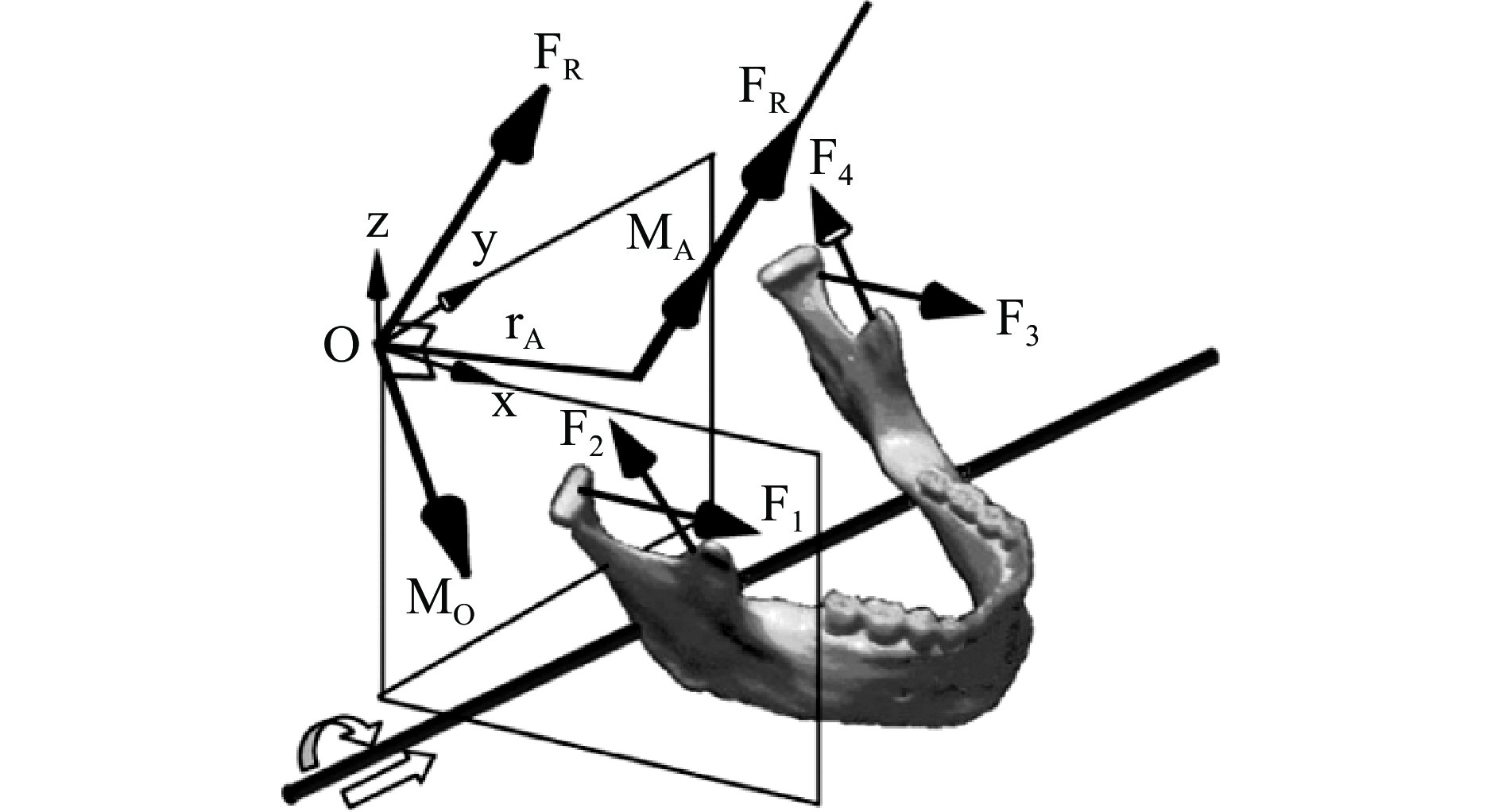
咀嚼过程中牙齿在下颚的带动下进行食物破碎,下颚运动的研究对于咀嚼的体外模拟有很大的作用。一般认为下颚对上颚的运动由旋转和平移两个方面组成,考虑到运动的非单一平面性,下颚的运动状态并不能简单通过单个目标位点的移动来检测。通常采用双螺杆理论对下颚运动轨迹和状态进行描述,如图2所示,该理论建立在下颌肌肉和下颌骨的计算机可视化三维模型之上,结合下颚骨跟踪器对下颚的运动状态做出简单模拟[20]。
双螺杆理论将下颚的运动模式归结为力的作用轴和运动轴两个部分,通过空间轴的方式将运动进行量化[7]。体外模拟很难完全还原下颚运动,但可以通过以上理论模拟出咀嚼时运动中的力量数据和位移数据,利用软件和机械的协调运作实现施加在食物上的力和体内的大致相同。
一个正常的咀嚼周期可分为三个阶段:打开、关闭和咬合阶段。下颚骨在张开阶段的速度开始缓慢,并随着嘴的张开而增加。当嘴开始闭合时,下颚向外侧移。它向牙齿快速闭合,然后因咬合而减慢。咀嚼食物时,打开速度比关闭速度快[21]。
2.3 咀嚼力和咀嚼肌
2.3.1 咀嚼力
咀嚼力对食物破碎情况的影响十分显著,目前对咀嚼力的测试方法也有很多。较为常用的测试方法为使用咀嚼肌电图(EMG),通过分析肌肉活动产生的电信号来预测咀嚼肌的强度与力度,并用于体外模拟的关键设计/操作参数。肌电图大多用在医学研究中,王建超等[22]利用EMG对咀嚼过程中咀嚼肌的不对称情况进行了研究,结果表明,在达到最大咬合力及中度咬合力时习惯于偏一侧咀嚼人群的两侧咀嚼肌的不对称情况达到最大。若研究相关人群咀嚼效率及食物破碎情况,需对该情况进行考虑,并纳入程序编写。
虽然没有直接的方程将肌电电压数据转换为力的单位,但肌电图可以非常准确的记录肌束活动的动态强度和规律。在下颚闭合的瞬间,力达到峰值。咀嚼开始和吞咽前的几个周期对咬肌的作用力相对较大[7]。
此外,也有研究人员新开发出较为简便的测试方法,本实验室[23]根据自制的咬合力测量仪开发了对人群最大咀嚼力进行快速准确测试的方法。该测量仪基于压阻式传感器进行测试,该传感器由多层材料组成,这些材料可以根据施加的负载产生可测量的电阻变化,主要由硅片和金属板包夹住力传感器组成。据此得出的试验参数可有效运用于吞咽能力评估。
2.3.2 咀嚼肌
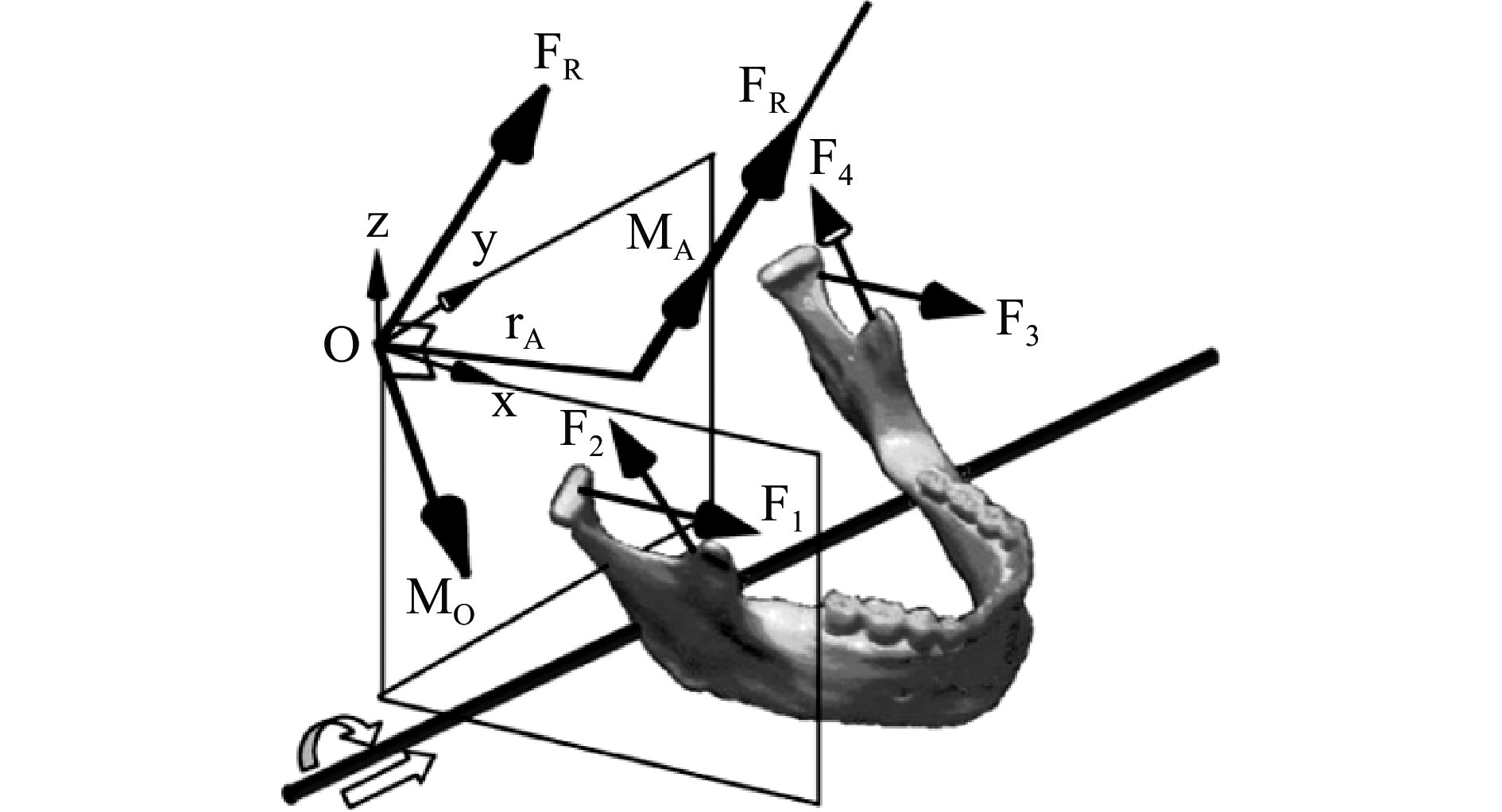
咀嚼肌在咀嚼中主要起到控制下颚的位置并产生适当的力量,通过中枢模式发生器控制咀嚼循环的作用[24]。咀嚼肌可利用三维模型进行观察,Oliver等[25]通过四个步骤得到咀嚼肌三维模型示意图:第一步:收集描述自然咀嚼的六自由度运动学数据集。第二步:扩展现有的咬肌数学模型,包括肌肉内的肌纤维分布。第三步:在肌纤维坐标系中定义一个能捕捉主动和被动肌肉行为成分的本构关系。第四步:使用上述模型、本构关系和边界条件,求解基于连续介质的有限弹性方程。
上述研究所得示意图如图3所示,上颚骨的绿色箭头和下颚骨的蓝色箭头描绘了附着区域产生的肌力的方向。且其的长度是由计算出的肌肉力量的大小来衡量的。a、c、e分别表示张开、收缩、闭合过程中的咀嚼肌三维正视图,b、d、f则为三个过程的咀嚼肌三维侧视图。
![]()
3. 咀嚼模拟器分类
咀嚼模拟器这一说法来源于体外模拟咀嚼装置,其研究自1986年就已有所进展[26]。目前已经有很多较为成熟的咀嚼模拟器在医学和食品等领域应用。谢俊明[27]根据机械结构原理对咀嚼模拟器进行分类,依据串并联结构差别对咀嚼模拟器进行结构和用途分析。作者根据已经公布的模拟器的不同功能对其简单分类,分类标准为不同咀嚼模拟器的研究目标和侧重点,非重点部分不再进行赘述。以方便不同领域研究人员进行选择。
3.1 咀嚼模拟研究装置
咀嚼是食物进入口腔后的消化过程中的第一步,咀嚼的研究建立在物理、化学以及医学等学科的基础之上。对咀嚼的模拟能力直接反应出了设备的仿生程度是否达到要求。大量研究人员针对咀嚼过程中的肌肉运动、骨骼结构、牙齿及舌头作用进行多方位模拟,咀嚼模拟装置成为目前咀嚼模拟器研究中最成熟也是应用最为广泛的类别,越来越多领域的研究人员加入到咀嚼模拟机器人开发的行列之中。出于不同研究目的,各咀嚼模拟器装置的咀嚼模拟程度不同。本节主要介绍侧重于咀嚼运动研究的咀嚼模拟器设备。
3.1.1 六联杆型咀嚼设备
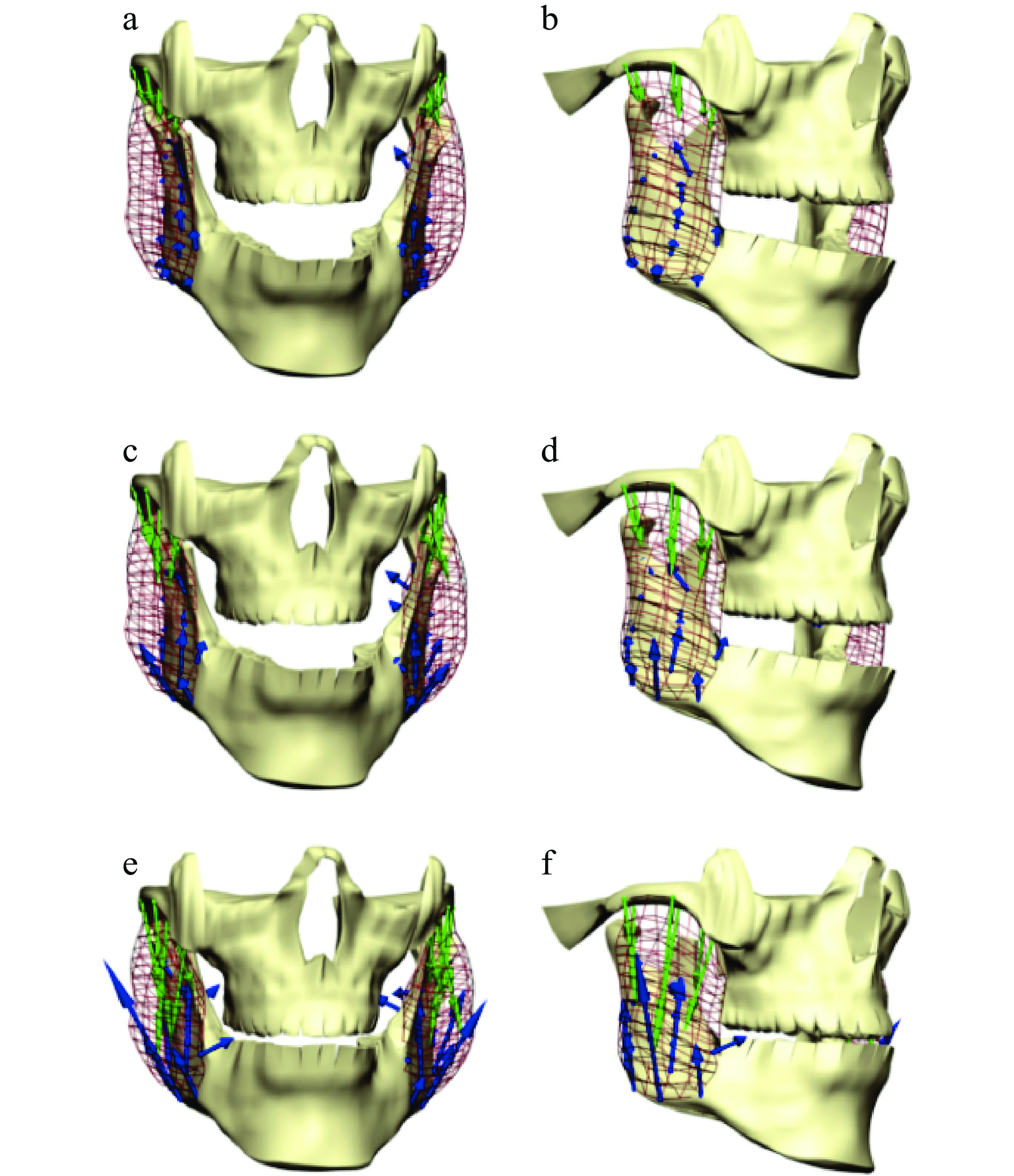
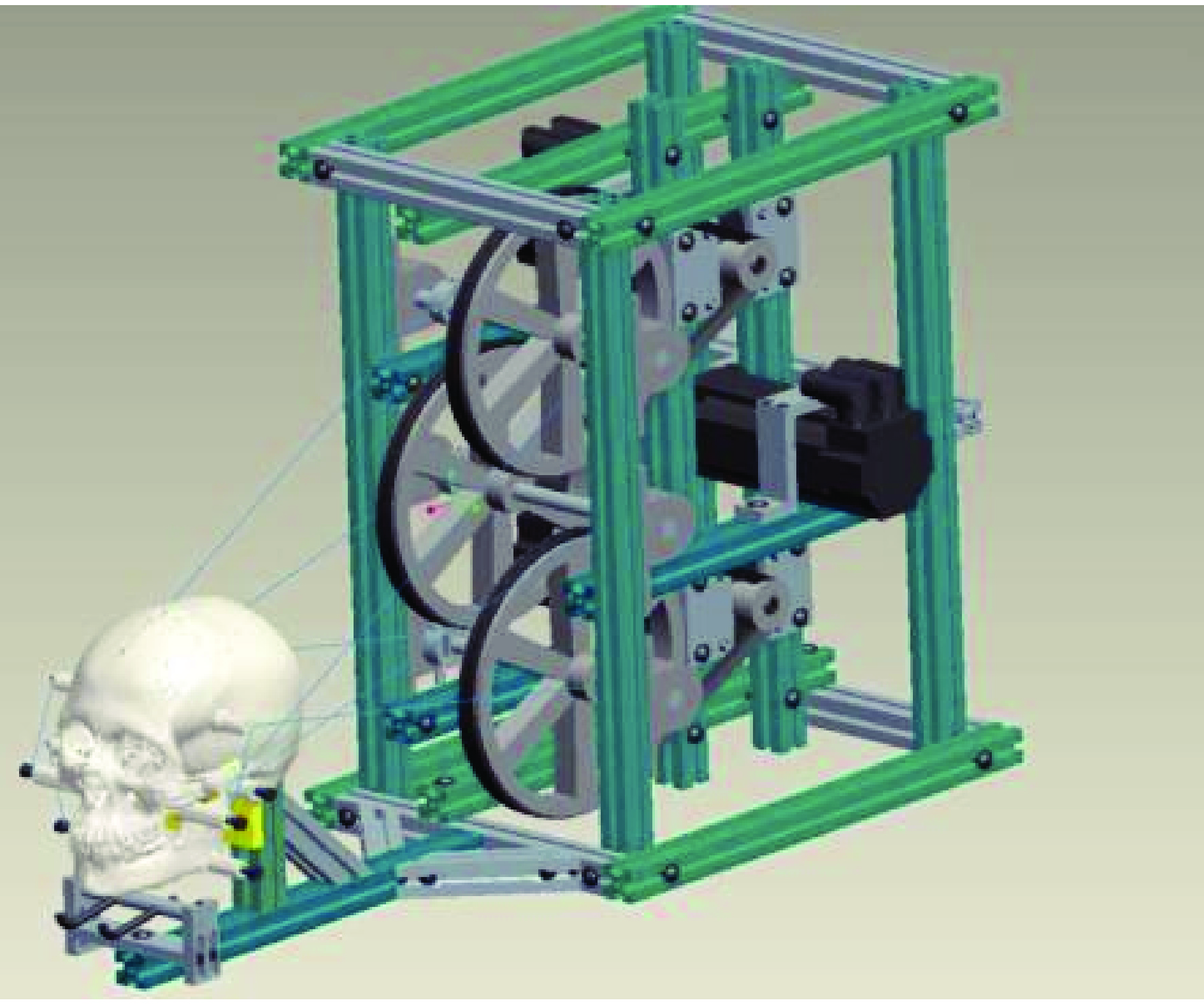
梅西大学的Xu等[28]研究开发出了一种六杆连接型咀嚼模拟器设备(如图4a所示)。该设备的侧重点是对下颚咀嚼过程中的运动轨迹模拟,运动轨迹如图4b所示,通过对下颚运动状态模拟实现咀嚼运动轨迹重现。六联杆结构能够有效模拟出下颚的六自由度运动,较高程度上模拟了下颚的运动轨迹模式。
![]() 图 4 六杆连接型咀嚼模拟器设备示意图注:a:仪器展示图;b:下颚运动轨迹示意图[28]。Figure 4. Schematic diagram of six-bar connection type masticatory simulator equipment
图 4 六杆连接型咀嚼模拟器设备示意图注:a:仪器展示图;b:下颚运动轨迹示意图[28]。Figure 4. Schematic diagram of six-bar connection type masticatory simulator equipment研究人员通过对比咀嚼模拟器模拟咀嚼后产生的食团粒径与人体体内实验咀嚼后产生食团的粒径之间无显著差异,从而判定装置的仿生程度达到要求。
但是该设备的咀嚼室密闭性较差,无法精确还原口腔中的真实环境,但该六联杆型设备主要针对咀嚼运动轨迹还原,实际口腔环境对实验结果影响较小,其对下颌运动轨迹的模拟方式非常值得研究人员借鉴参考。
3.1.2 高咀嚼仿真度咀嚼模拟器
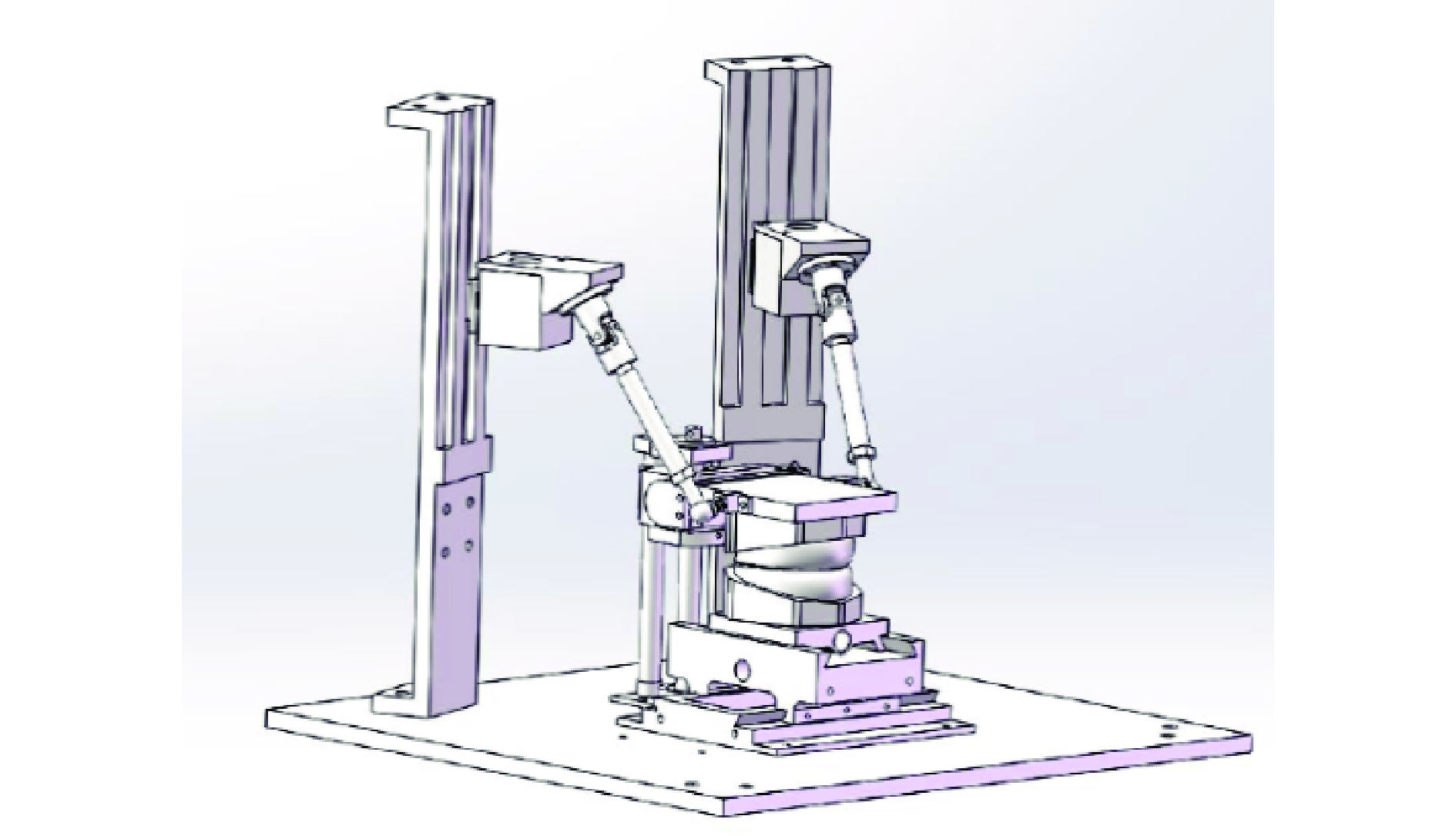
电子科技大学谢俊明[27]根据设计进行改良并搭建出了咀嚼仿真度较高的咀嚼模拟器装置。研究人员针对仿生度的提高,对设备咀嚼结构的自由度进行了具体的分析,利用Kutzbach-Grübler公式对自由度进行计算,并引入螺旋和反螺旋概念分别表示结构在受到约束下的运动和运动中受到的约束。研究人员对样机的模拟如图5所示。
![]()
该设备经测试证实能够模拟出满足下颚运作的工作空间,同时可有效模拟出下颚运动轨迹及咬合力,对食品在口腔中的破碎情况模拟及咀嚼力采集具有很好的参考作用。但该设备中的咀嚼肌模拟连杆及压力传感器位置并未达到模拟真实人体结构的要求,导致测试结果上可能会有所偏差。最为重要的是该设备并未进行动力学分析及测试,动力学分析部分还未达到仿真要求。
3.1.3 仿下颚运动并联咀嚼模拟器
大连理工大学从2012年至2016年皆有咀嚼模拟器相关研究的发布[29-31],从咀嚼模拟器的初始设计起对设备的实验研究可行性、性能改进、参数优化都做了相关研究,并根据结果对开发的咀嚼模拟器设备进行相应的改进。2015年大连理工大学温海营等[32]基于咀嚼模拟器研究开发出了冗余驱动咀嚼模拟器,冗余是指对系统中的部分配件的不断重复,冗余并联在咀嚼模拟器中以改变关节的主动性以及增加起驱动作用的支链的形式表现。该方法可提高模拟装置的可操纵性,提高仿生度。
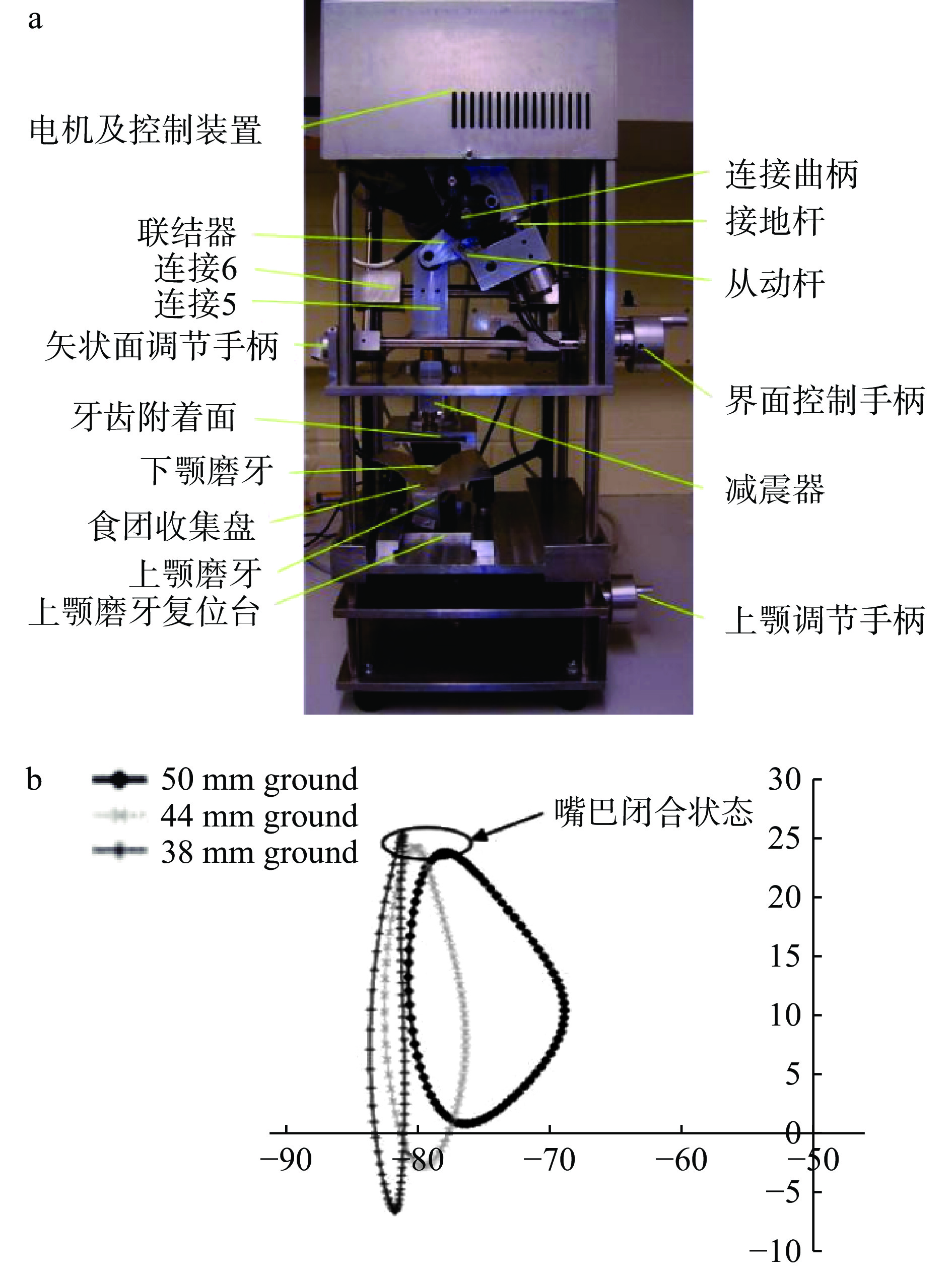
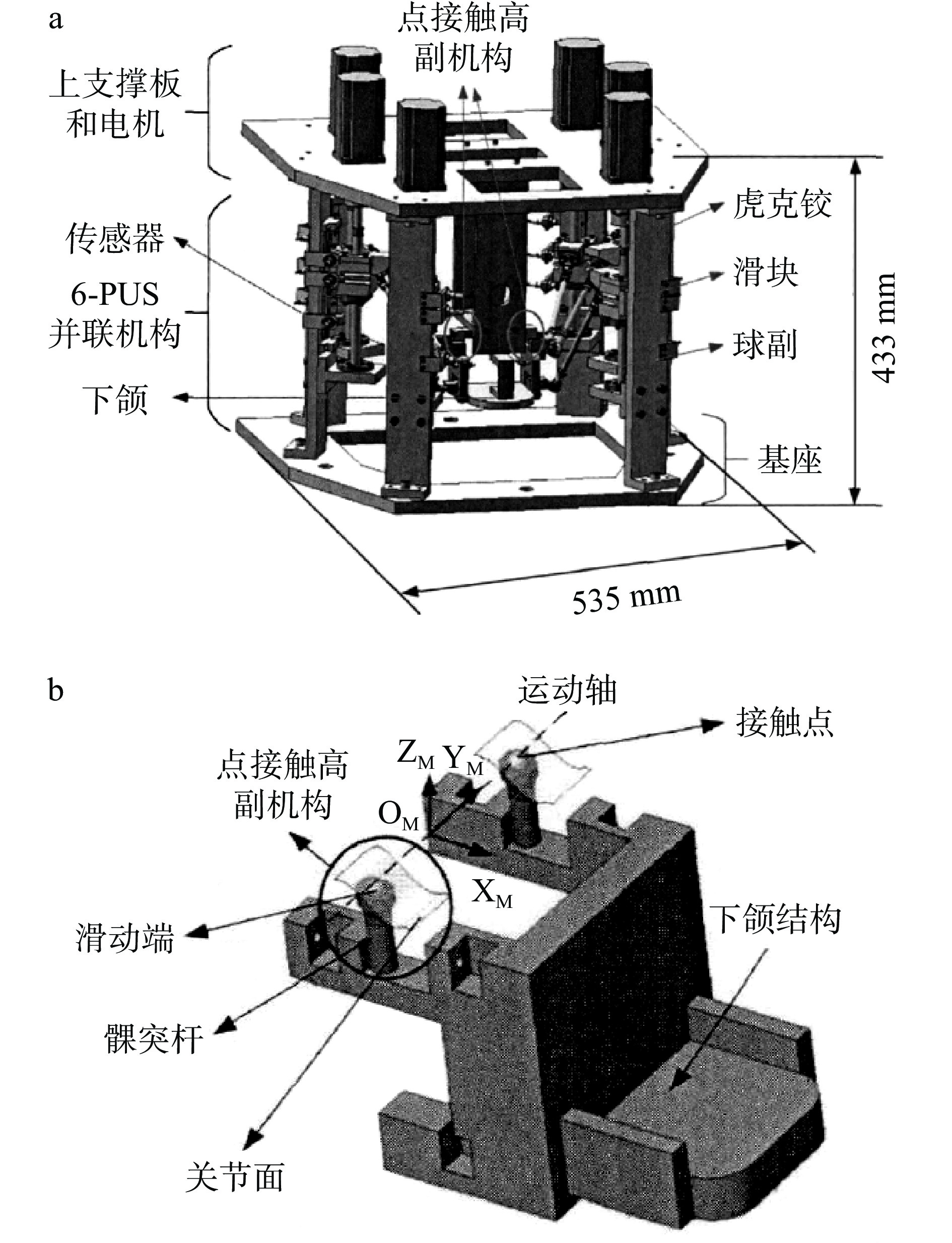
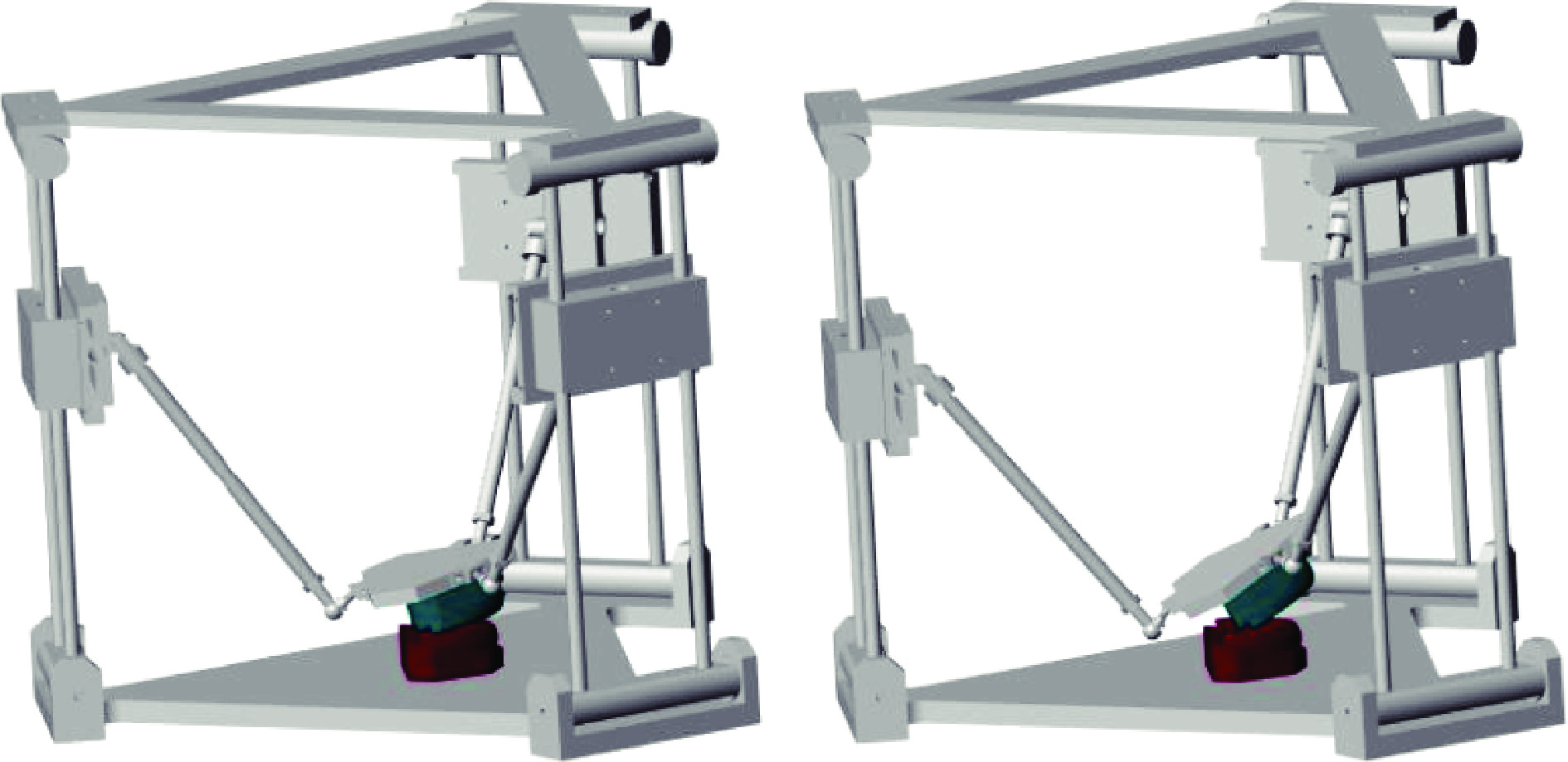
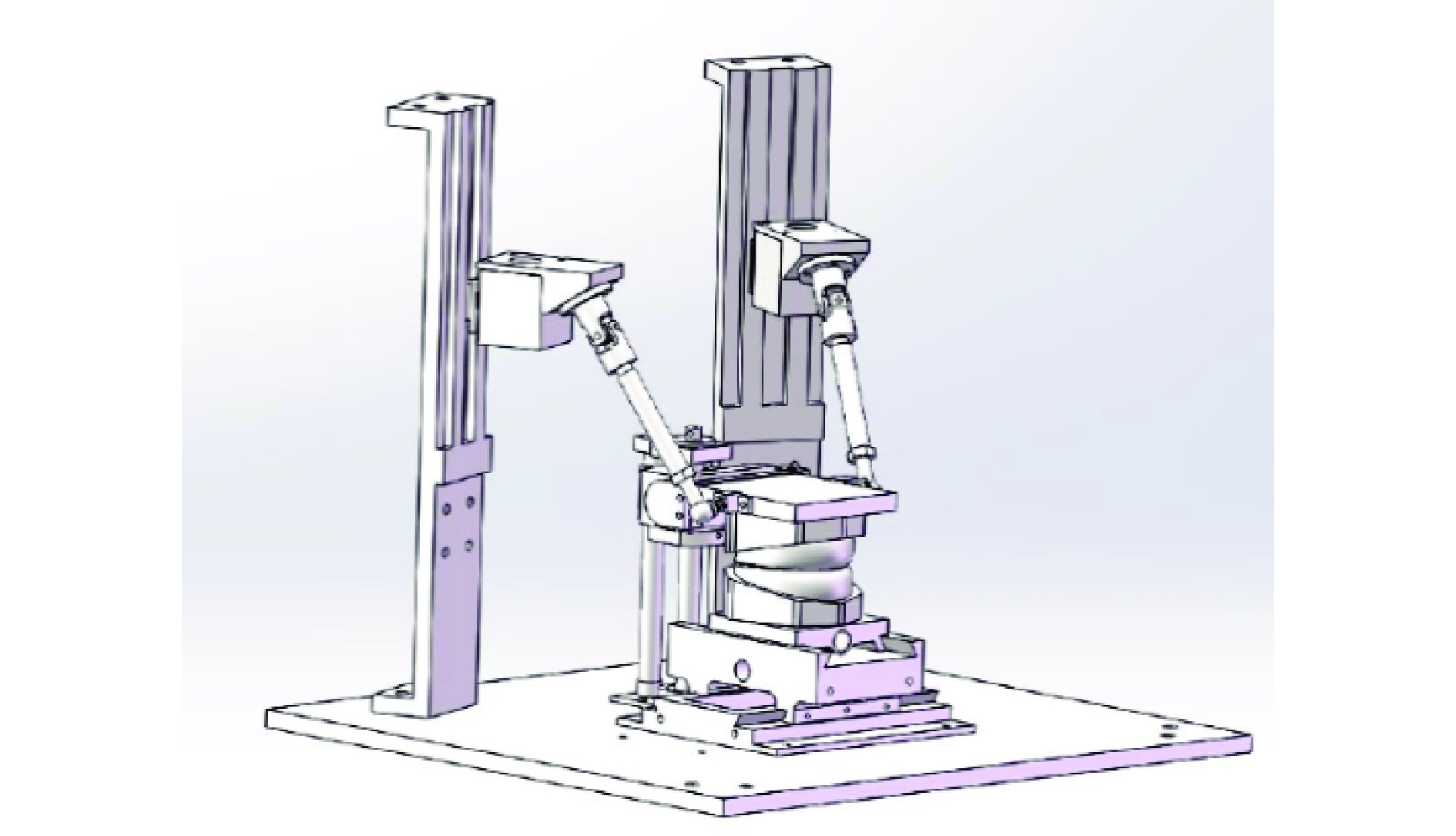
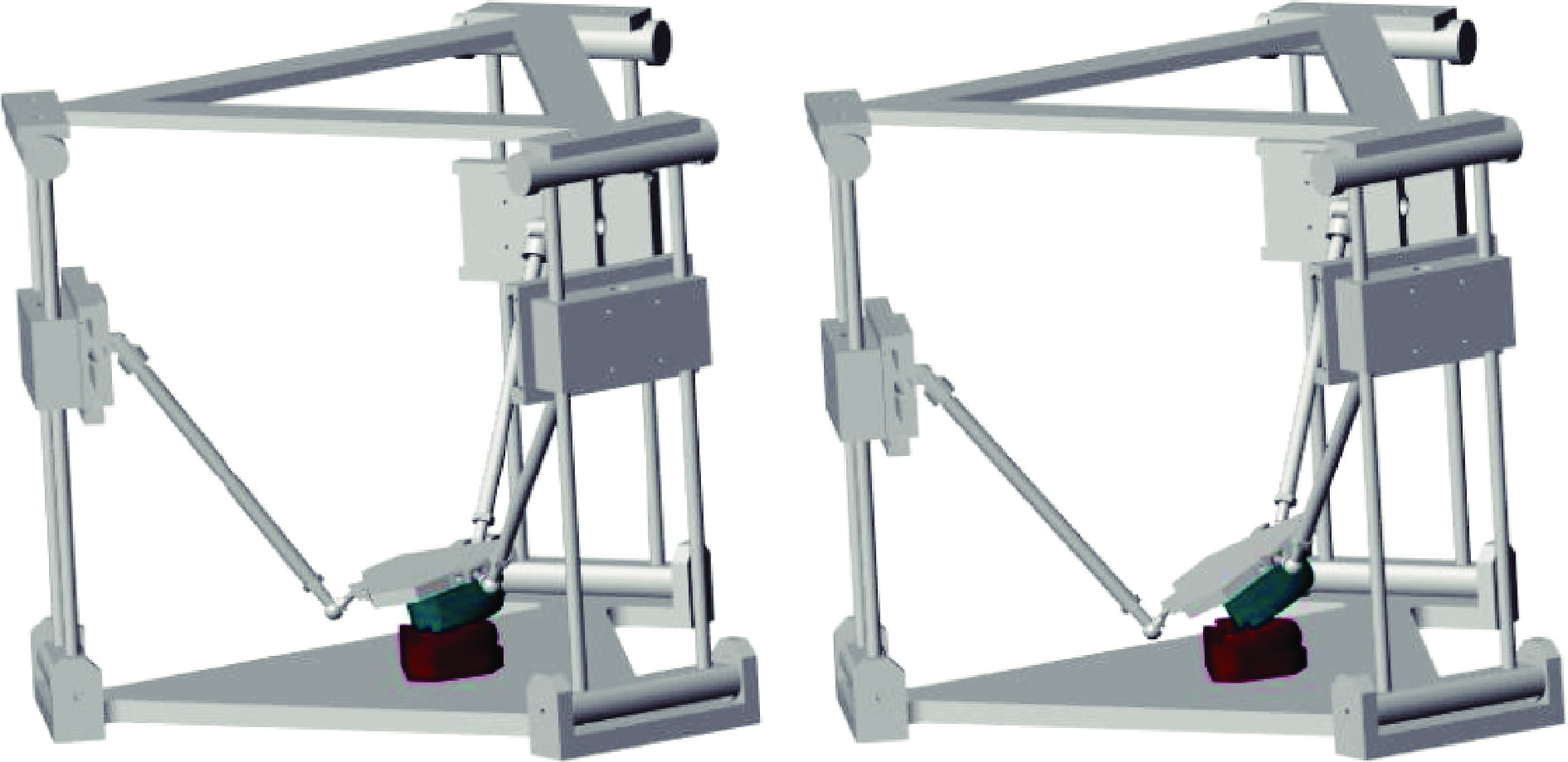
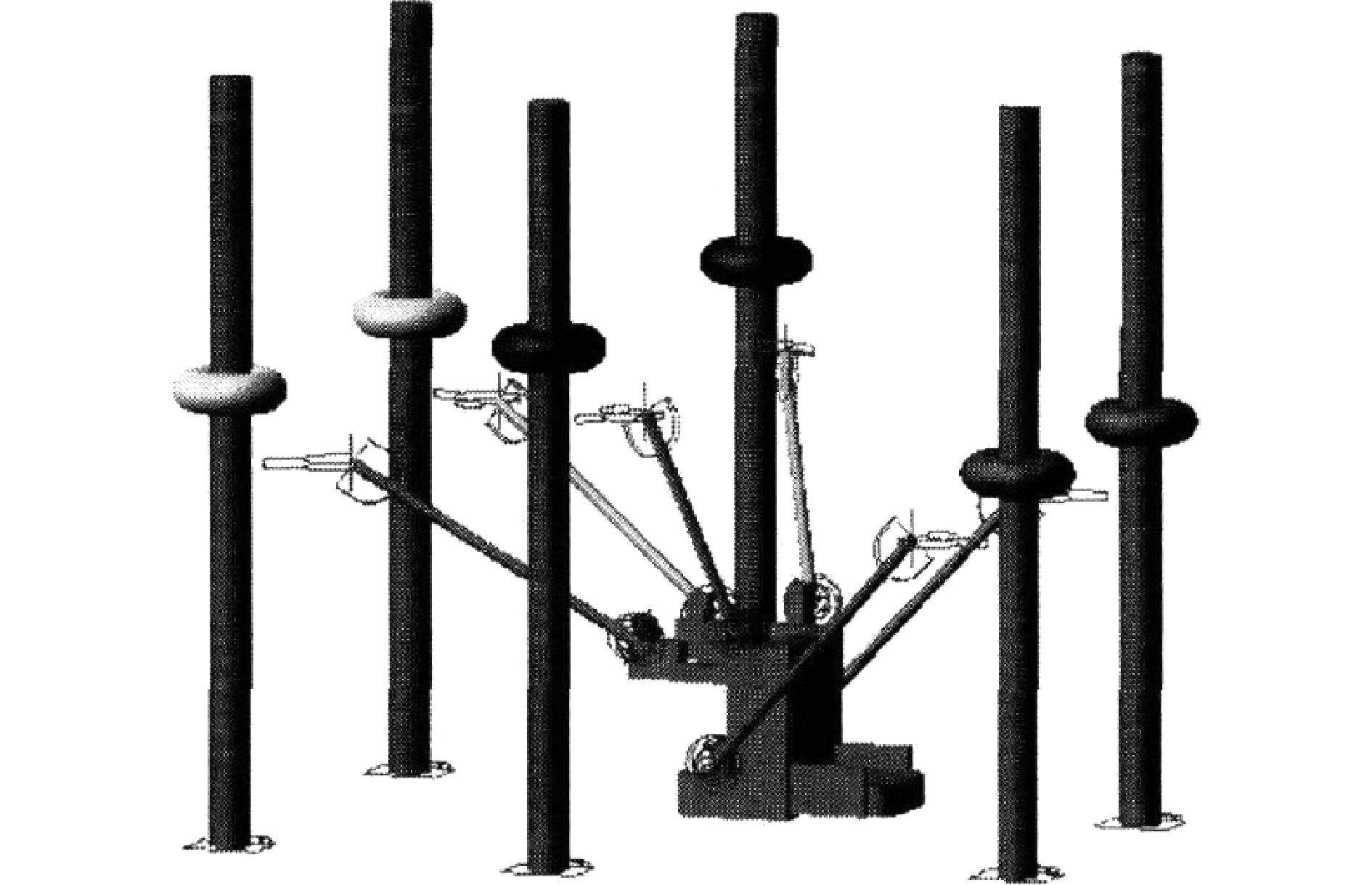
2016年温海营[33]开发出点接触高副冗余驱动咀嚼模拟器,对控制咀嚼和张闭口的颞下颌关节(TMJ)模拟方法进一步研究,引入由点、线接触的运动方式来模拟TMJ,具体模拟方法是采用固定在下颌结构上的约束杆和一块具有模拟TMJ接触面形式的下颌窝块(如图6a所示),这种点接触结构使下颌结构运动更加灵活,仿真度提高。利用该结构建造的设备如图6b所示。
![]() 图 6 大连理工大学的咀嚼模拟器设计注:a:模拟下颌运动示意图;b:咀嚼模拟器三维模型[33]。Figure 6. The masticatory simulatordesign of Dalian University of Technology
图 6 大连理工大学的咀嚼模拟器设计注:a:模拟下颌运动示意图;b:咀嚼模拟器三维模型[33]。Figure 6. The masticatory simulatordesign of Dalian University of Technology由上述介绍可知,大连理工大学的装置对下颌运动模拟有很大的进展,其仿生程度已达到较高水准,咀嚼模拟程度也很高。其研究成果对咀嚼模拟器发展具有很大帮助和意义。为食品领域的咀嚼模拟器发展提供了很好的参考和技术支持作用。
3.1.4 AM2咀嚼模拟器设备
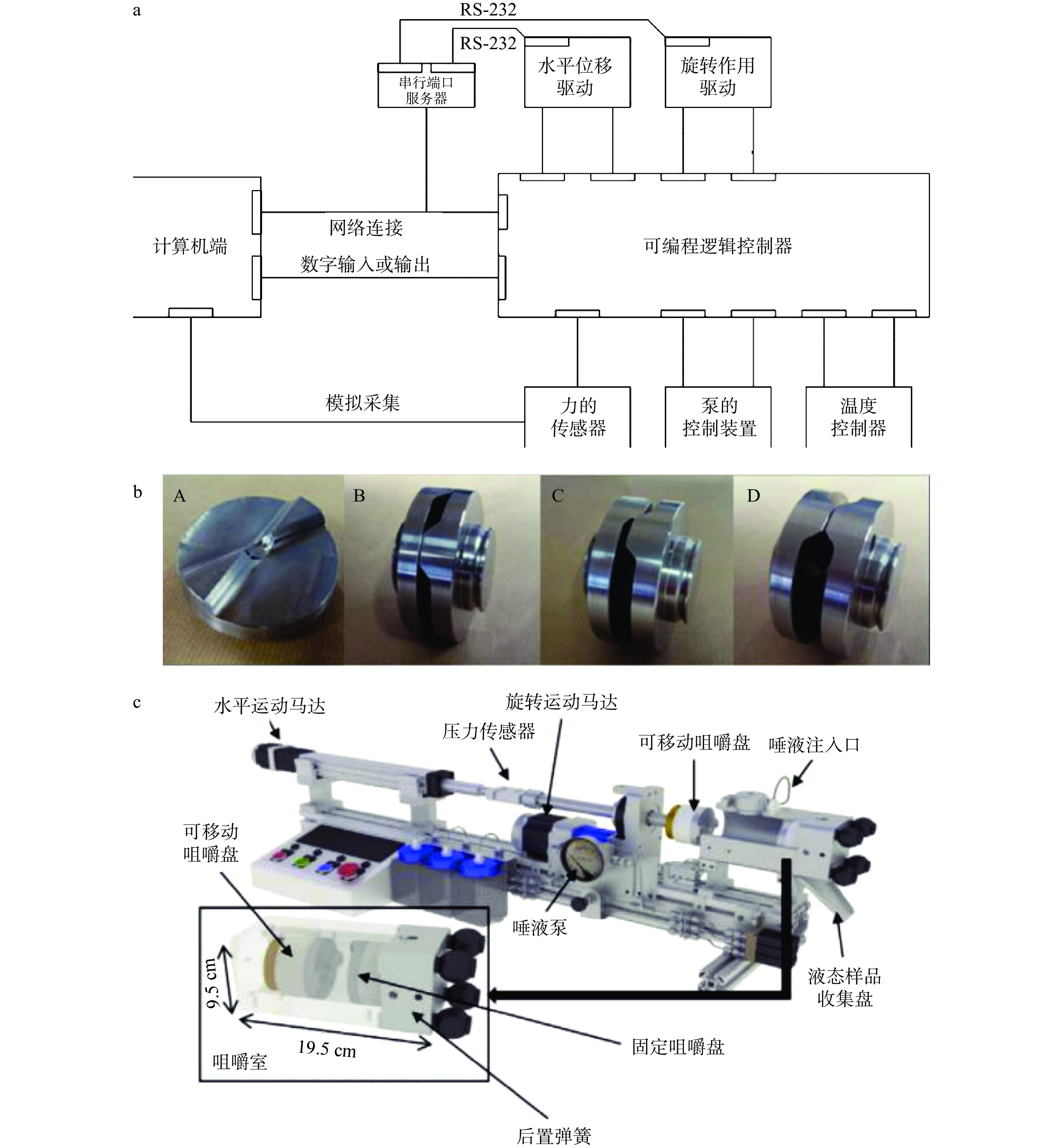
有学者[34-36]开发出AM2咀嚼模拟器设备,该设备利用弹簧和具有模拟牙齿切面结构的圆盘模拟出咀嚼运动下的口腔结构,设计出具有较好密封能力和温度控制能力的咀嚼室(其主要控制程序如图7a所示)。其牙齿和舌头模拟圆盘如图7b所示,B阶段圆盘中牙齿模拟部分并不会接触,上下两个圆盘可接触到对方表面;C阶段上下颚盘表面牙齿模拟部分相交,倾斜部分的边缘相切,在下颚圆盘的带动下上下滑动,上下部分接触时下颚盘赋予下颚盘压力,使其后部的弹簧作出反馈;D阶段是最大程度的压缩。以上模拟程序原理是重现前磨牙和臼齿的施力和运动情况。最终设备如图7c所示。
![]()
该设备有效还原口腔的密闭环境,保证模拟咀嚼室符合口腔中理化参数指标,并添加可控唾液泵控制,提高实验结果的真实性和说服力。并为该设备后续研究口腔中的香气释放等研究奠定了基础。
3.1.5 用于体外咬合力测试的咀嚼模拟器
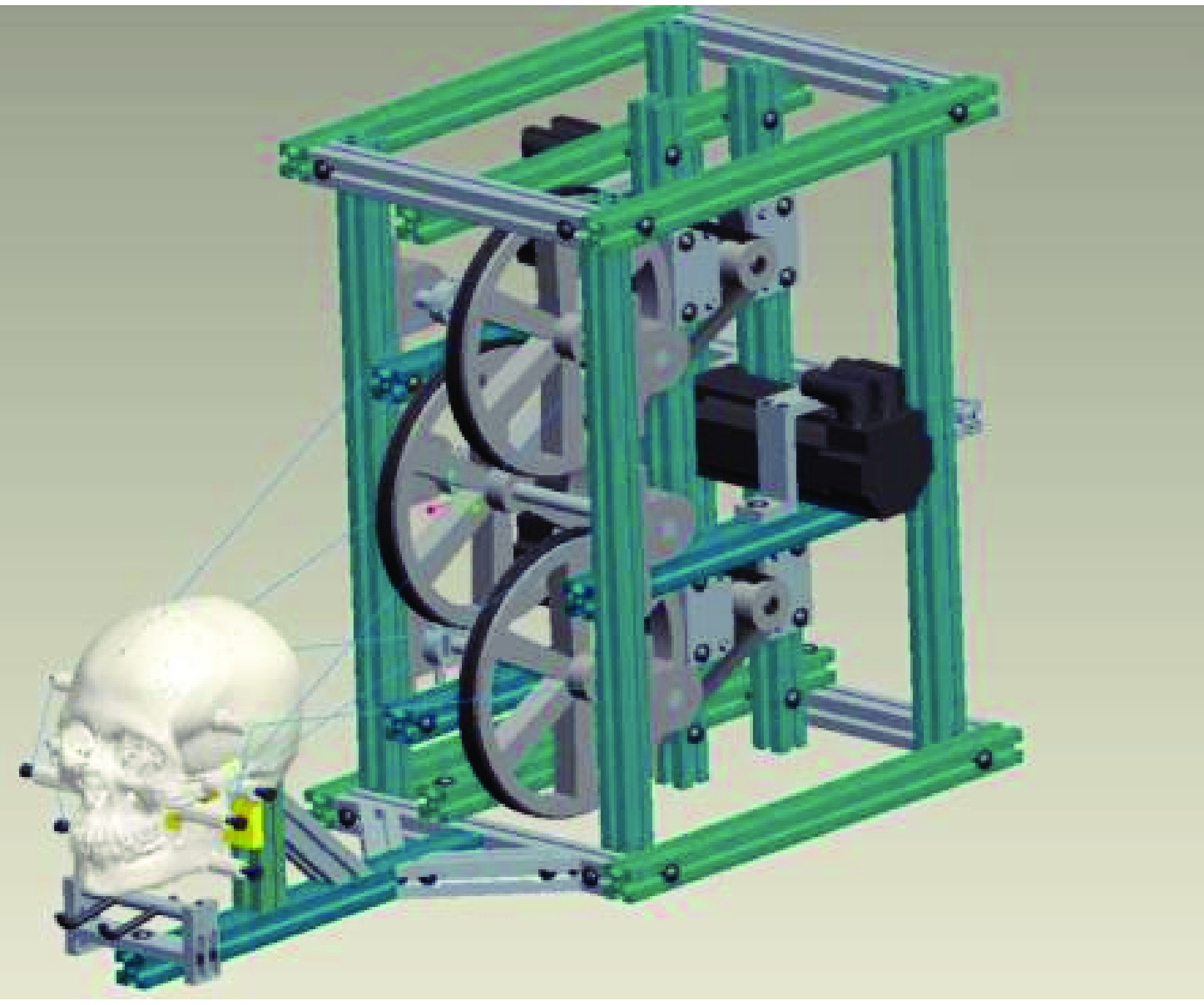
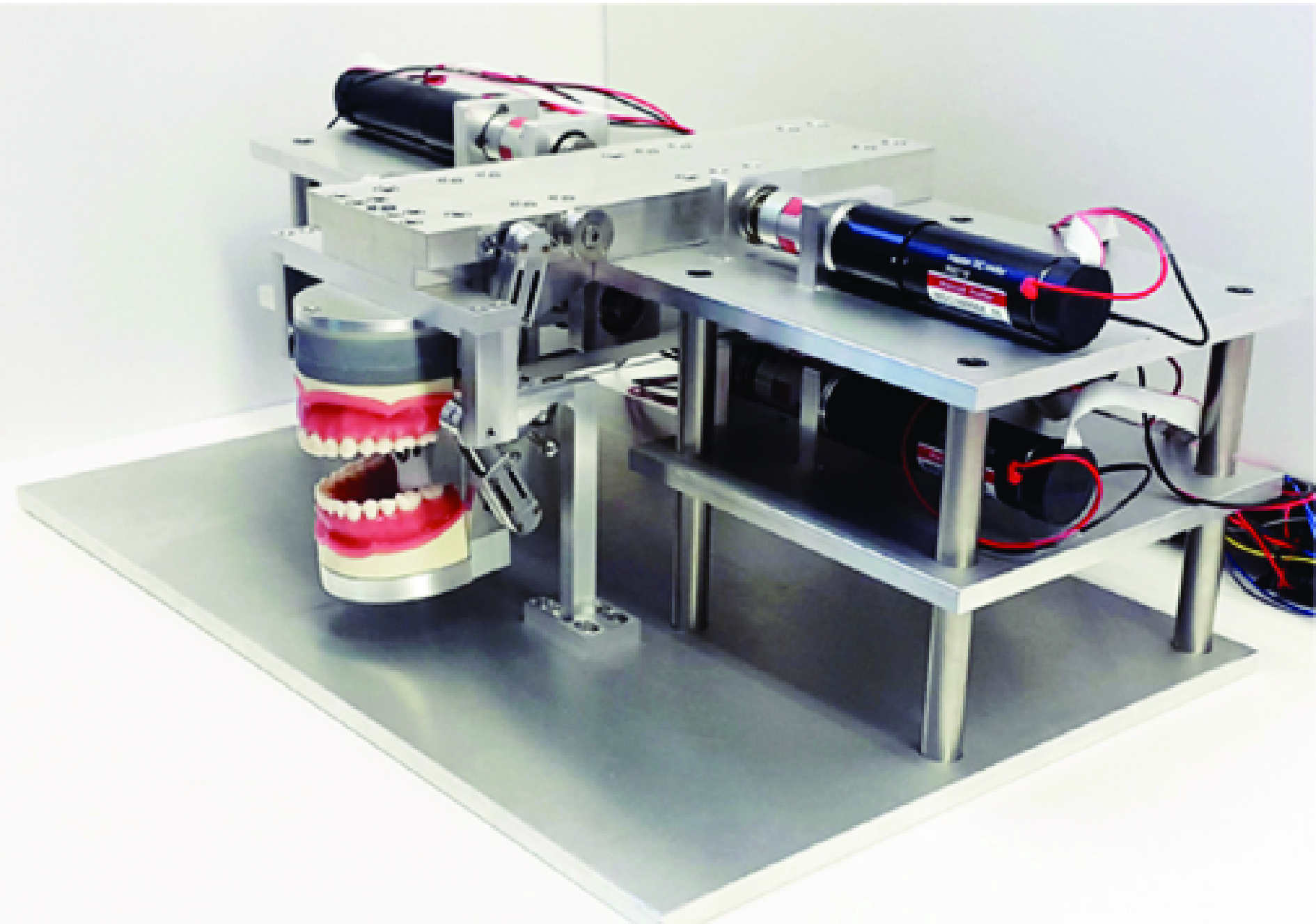
Chang等[37]开发出一台对咀嚼过程中咬合力进行测试的咀嚼模拟器设备(如图8所示),主要是由电机带动模拟下颚进行运动无法完全模拟实际的咀嚼情况。Lee等[38]研究人员也开发出了测定咬合力的咀嚼模拟器(如图9所示),该设备在上颌的每个假牙上安装微型测压元件,可用于测量假牙与食物之间的作用力。
该类型设备能够有效取代原有手动咬合力测量方式,提高研究人员工作效率,但其对运动轨迹和咀嚼室环境设计要求较低,对其进行更广泛研究起到了一定的限制作用。
3.1.6 咀嚼吞咽一体化模拟咀嚼模拟器
吞咽是食品口腔加工中的最后一步,吞咽障碍是目前口腔类疾病中较为棘手的问题之一。相关咀嚼模拟器设备可用于解决难以直观观察到吞咽过程中食团的变化过程及其影响因素同时吞咽障碍患者难以直观反映出吞咽过程中的感官感受等问题[39]。
吞咽模拟咀嚼模拟器设备在国外起步较早,目前为止有:英国剑桥大学的Mackley等[39]为了跟踪流体在体内加工过程中的行为,设计并测试了一款咀嚼模拟器装置,但该装置不能模拟吞咽期间会厌的运动,仿真程度不高。布鲁内尔大学的Noh等[40]在利用六联杆装置进行体外模拟咀嚼运动的基础上结合荧光成像和视频监控系统,搭建了视频荧光吞咽研究系统。实时监控吞咽过程中的食团变化情况,用于吞咽障碍患者食用食品研究(如图10所示)。瑞典RISE科学技术研究院的Stading等[41]结合流变学原理设计了一款“Gothenburg”模型,该设备简化了口腔设计,注重于咽部至食管部分研究,装置如图11所示,较好地模拟了体内的吞咽过程。
![]()
![]()
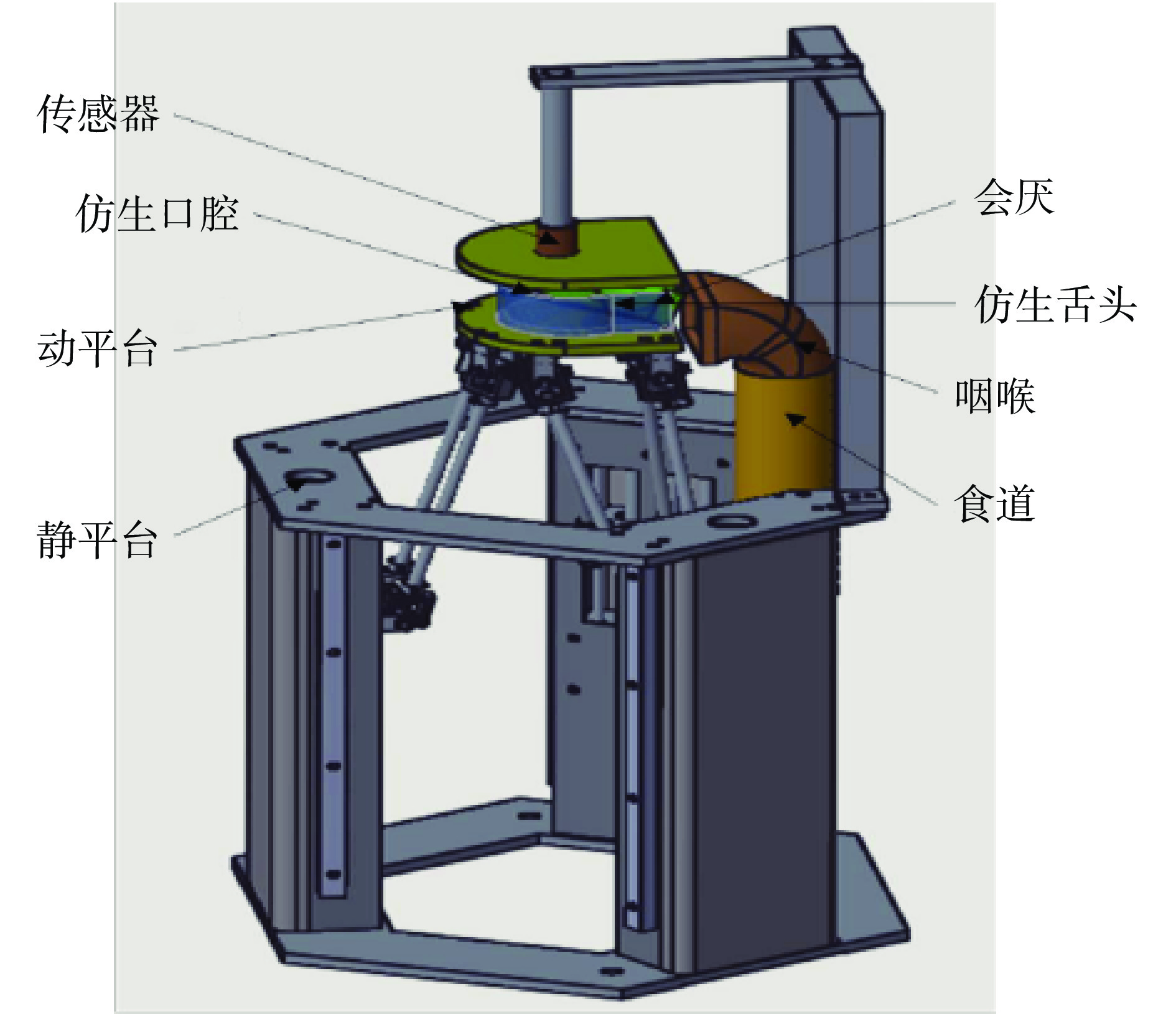
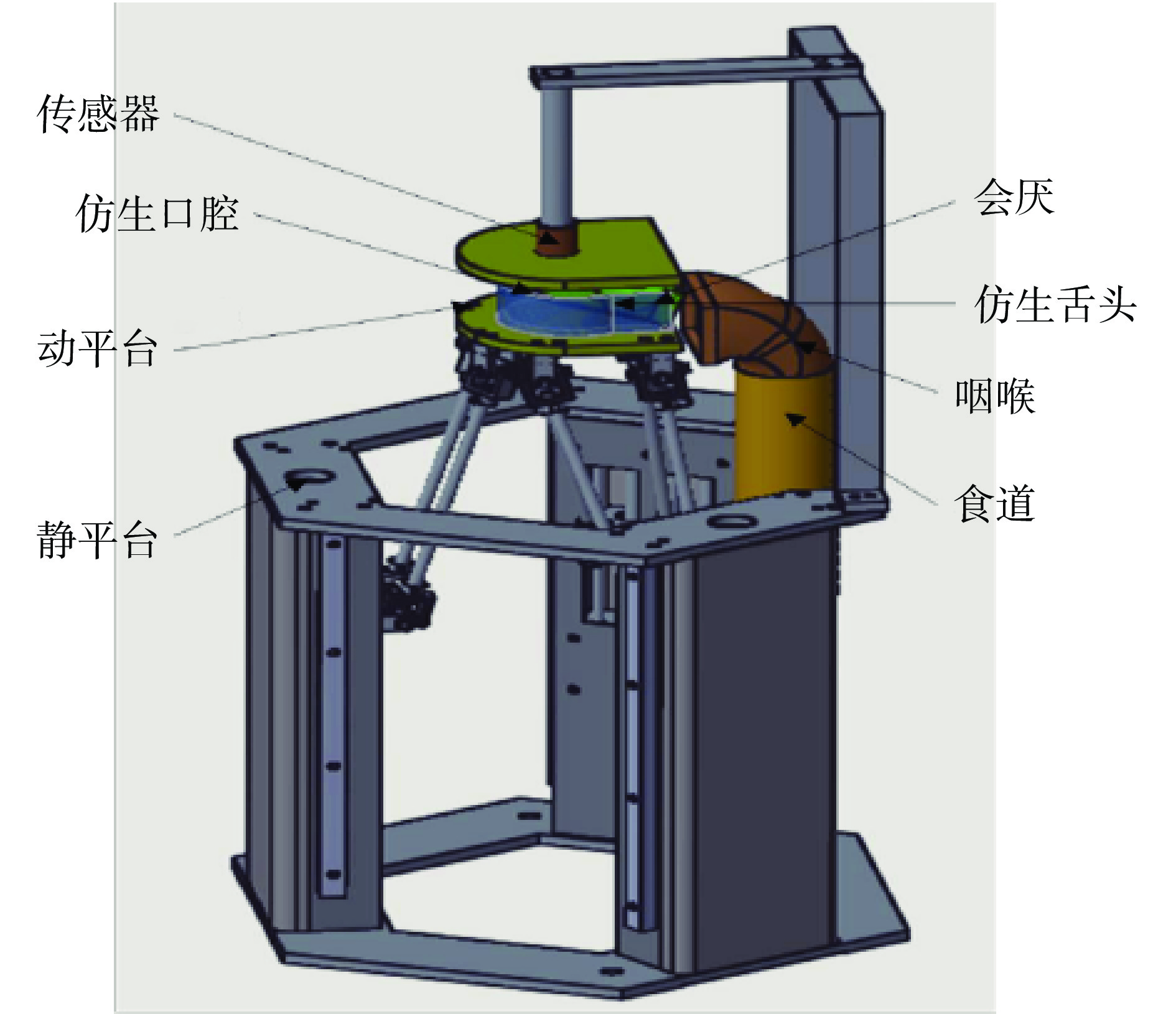
国内江南大学的韩敬虎等[42]对吞咽部分进行体外模拟。食物在咀嚼作用后在仿生舌作用下进行食团凝聚并输送到咽部,并送入食道,食道部分由3D打印方法制作,食道壁上均匀分布十六个充气孔,孔后连接充气管,充气管可用于控制食道内压力变化,通过压力作用进行食团运输,设备如图12所示。
![]()
3.2 基于咀嚼模拟的风味释放检测咀嚼模拟器
咀嚼模拟器对咀嚼系统的高仿真度为香气释放条件和来源奠定了真实基础,尽可能确保体外模拟中香气的释放环境和方式,但单纯依靠目前的咀嚼模拟器设备难以直接反应出风味物质的组成和口腔参数对风味物质释放的影响。日后风味释放研究将会建立在咀嚼模拟器的体外模拟上结合咀嚼模拟器和人工鼻等体外仿生系统,对体内情况作出真实模拟。
一般对风味释放的感知分为挥发性和非挥发性成分,非挥发性风味物质通常由味蕾感知细胞识别,挥发性有机化合物(VOCs)通常经过口腔加工后由鼻腔中味觉受体感知。针对风味检测咀嚼模拟器的研究重点也放在了VOCs检测上[43]。
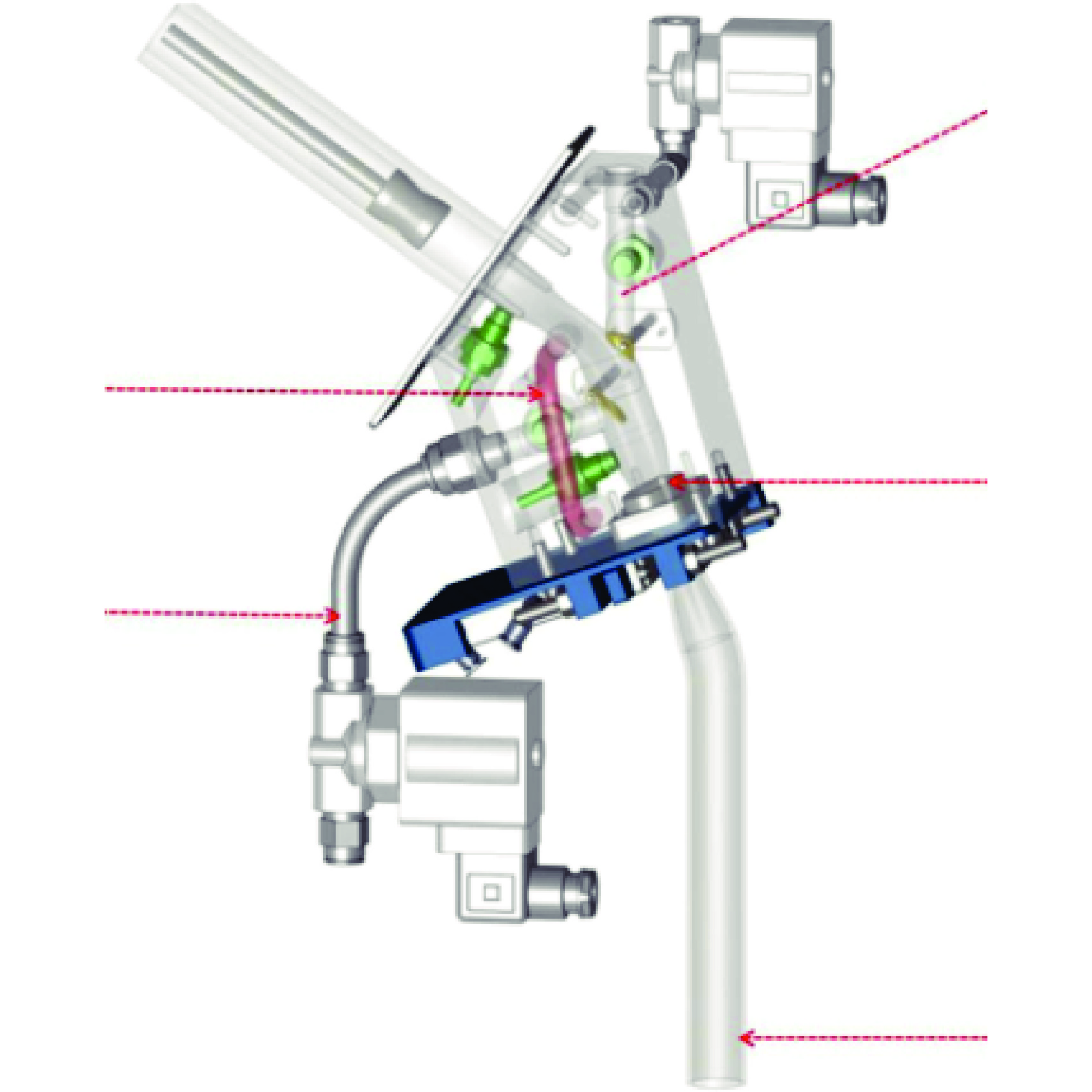
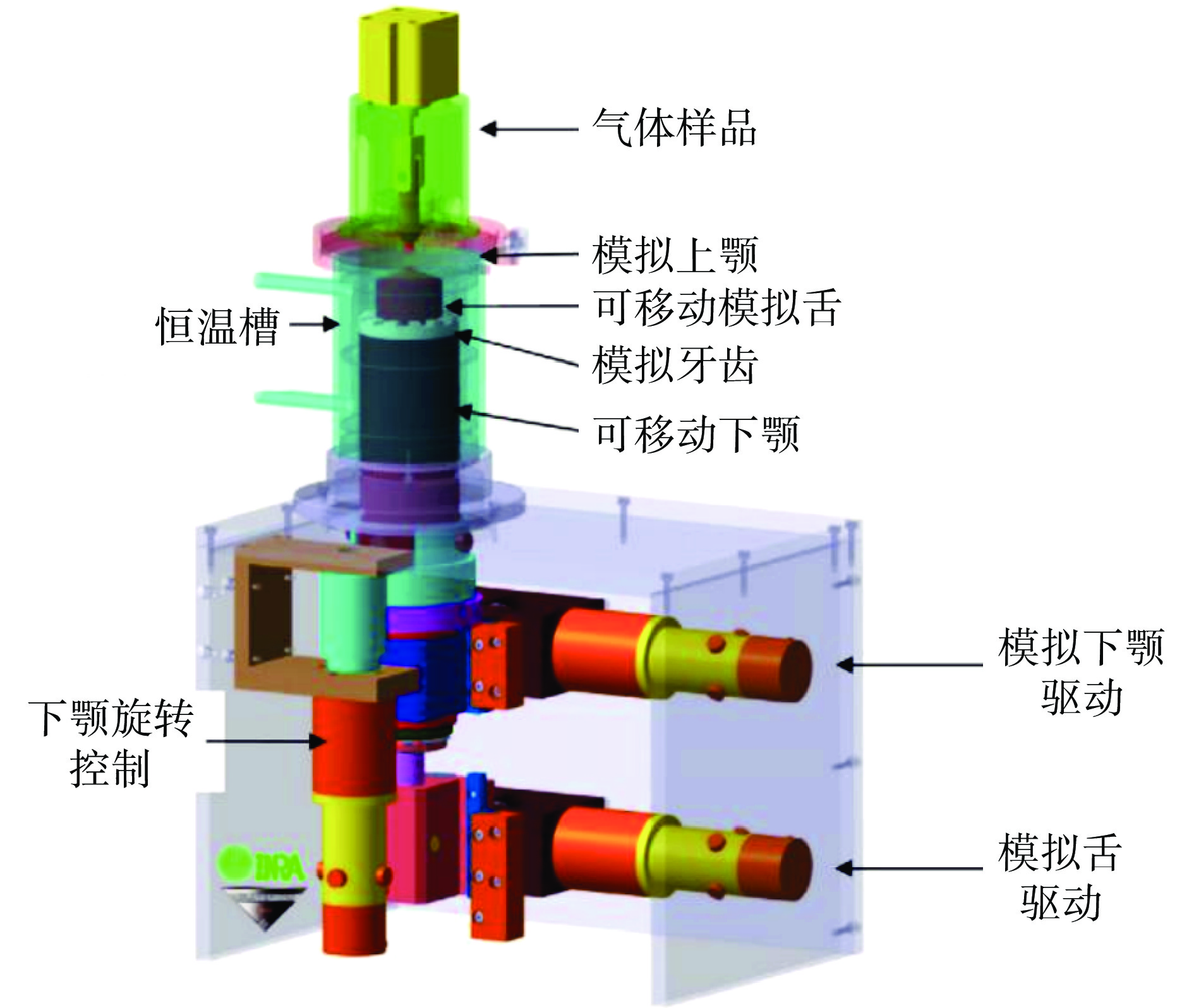
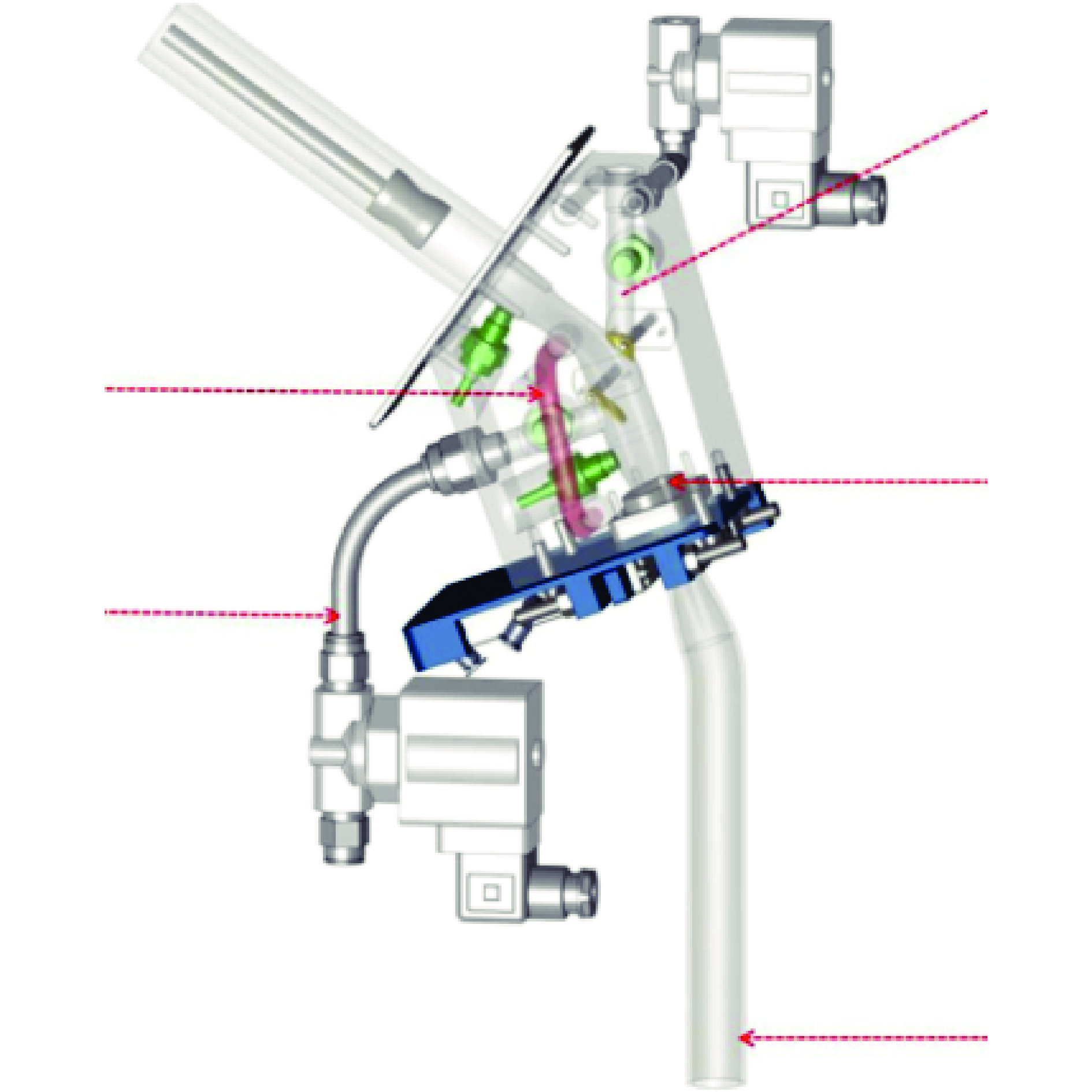
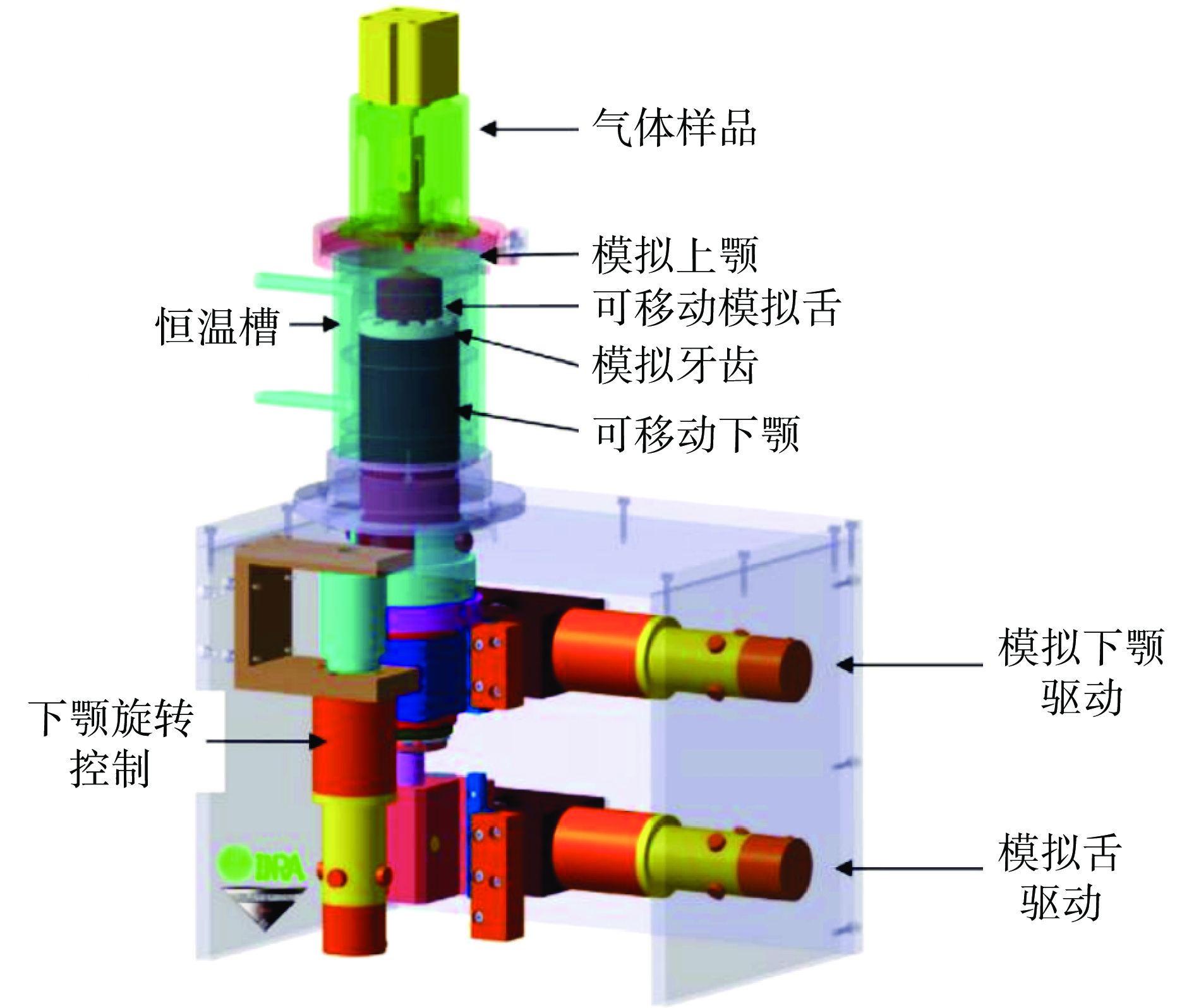
法国勃垦地大学的Salle等[44-46]研制了用于检测咀嚼后食物的风味释放研究的咀嚼模拟器,并将其应用于豌豆粉咀嚼破碎研究、不同口腔参数对香气释放的影响及参数之间的相互影响等研究。形成了较为成熟完善的咀嚼模拟器研究体系。如图13所示。该装置从顶空部分采集风味成分,并和大气压化学电离质谱联用,进行风味物质的质谱分析。
勃垦地大学咀嚼模拟器装置是目前对咀嚼室气密性和气体损失率要求最高的设备,其特殊的聚醚乙酮涂层能够有效减少风味气体成分的损失。但该设备的咀嚼模拟方式精确度较低,有待改进。
3.3 食品材料性质检测设备
目前,国内外对食品性质的检测方法主要是利用质构仪、流变仪等测量仪器进行检测。但测量仪器与真实咀嚼状态相比,并不能很好的模拟咀嚼运动轨迹和牙齿、舌头给食物带来的压力、剪切应力和摩擦力。因此不少研究人员将体外模拟装置和食品材料性质检测相结合,尽可能还原真实状态下的食物性质。下举一列进行介绍:
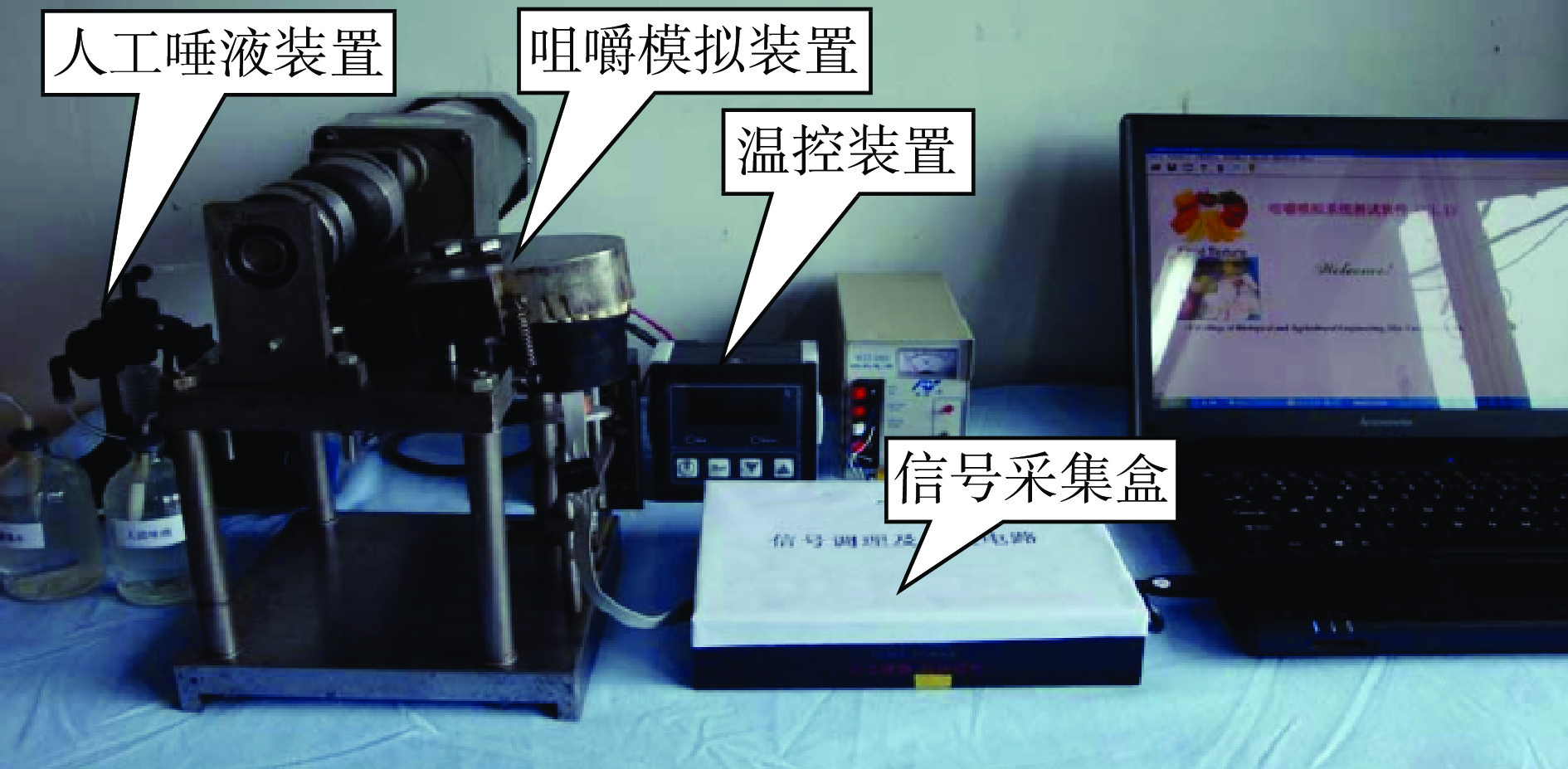
吉林大学孙钟雷[47]基于TPA和咀嚼模拟器系统建立了一种能够结合仪器设备和感官评价的食品质地评价方法。对下颚、唾液的分泌系统、口腔温度控制系统等进行系列优化,最终使得装置最大咀嚼效率达到92.3%。研究人员借助咀嚼模拟器分析咀嚼力所做的咀嚼功,建立食品咀嚼性评价方法,证明可利用咀嚼模拟器有效预测出食品的可咀嚼性。该模拟装置如图14所示。
![]()
3.4 模拟人类语言动作咀嚼模拟器
Hashimoto等[48]研制出表面覆盖有弹性皮肤的面部机器人,可利用人工肌肉产生可识别的面部表情。但这些机器人不能很好的模拟出人类语言动作状态,导致其表情不自然。
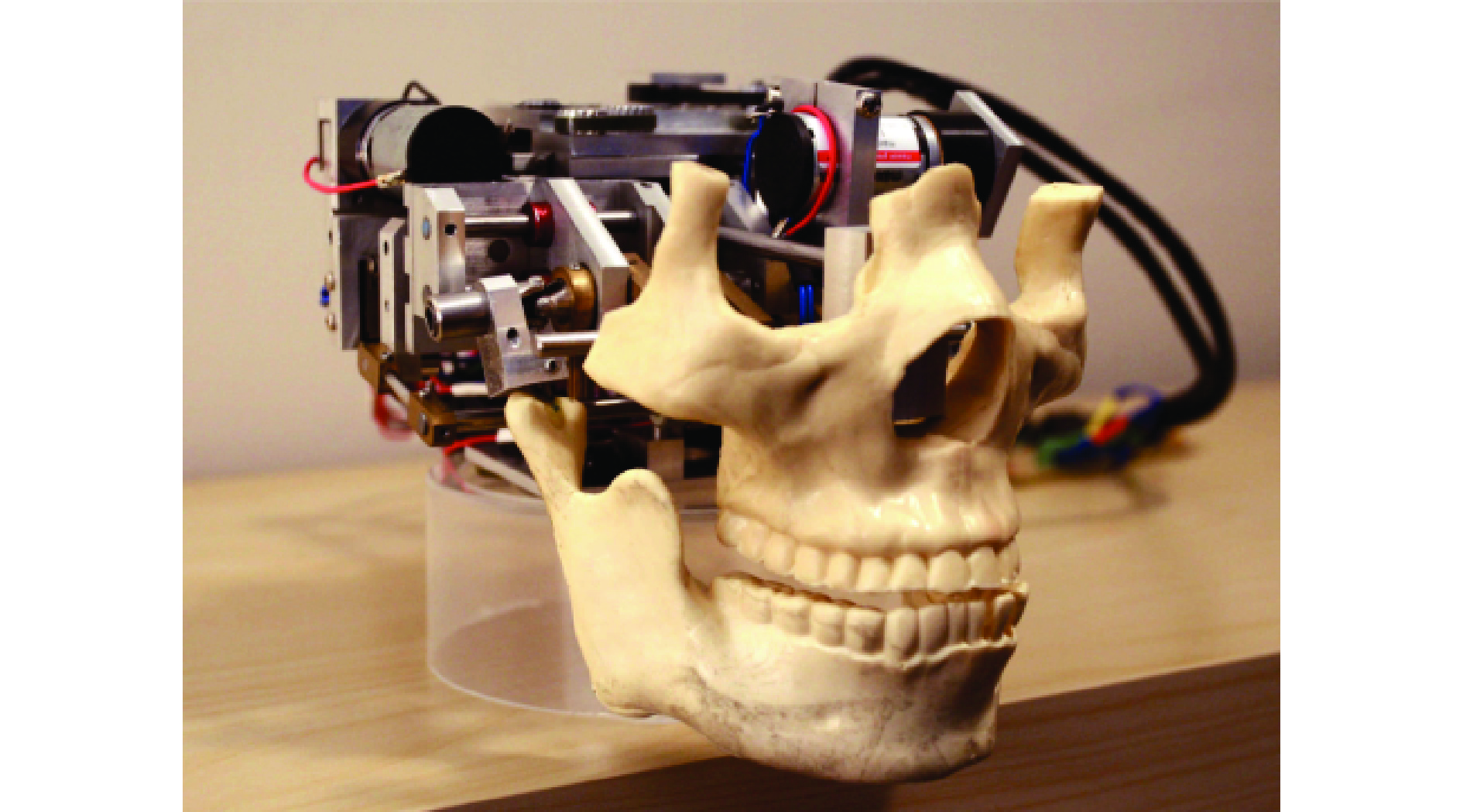
Flores等[49]根据人类在交流过程中的下颌变化情况开发出可模拟人语言动作的咀嚼模拟器,下颌的运动可带动整个面部皮肤的变化,是实现机器人和人类交流的重点环节。该设备模拟髁突围绕仿生颞下颌关节TMJ的六自由度运动,利用电机带动模拟下颌进行运动,可通过电脑程序对该设备进行运动轨迹调整。装置如图15所示。
![]()
对人类语言模拟咀嚼模拟器的研究相对较少,相信在下颌运动模拟仿真度不断提高的环境背景下,人类语言模拟研究也会获得一定的进步。
3.5 医学研究装置
咀嚼模拟器的发展源自于医疗研究用咀嚼模拟器,医疗用模拟装置发展时间最为久远,技术较为成熟,在不同医疗领域都有所发展。
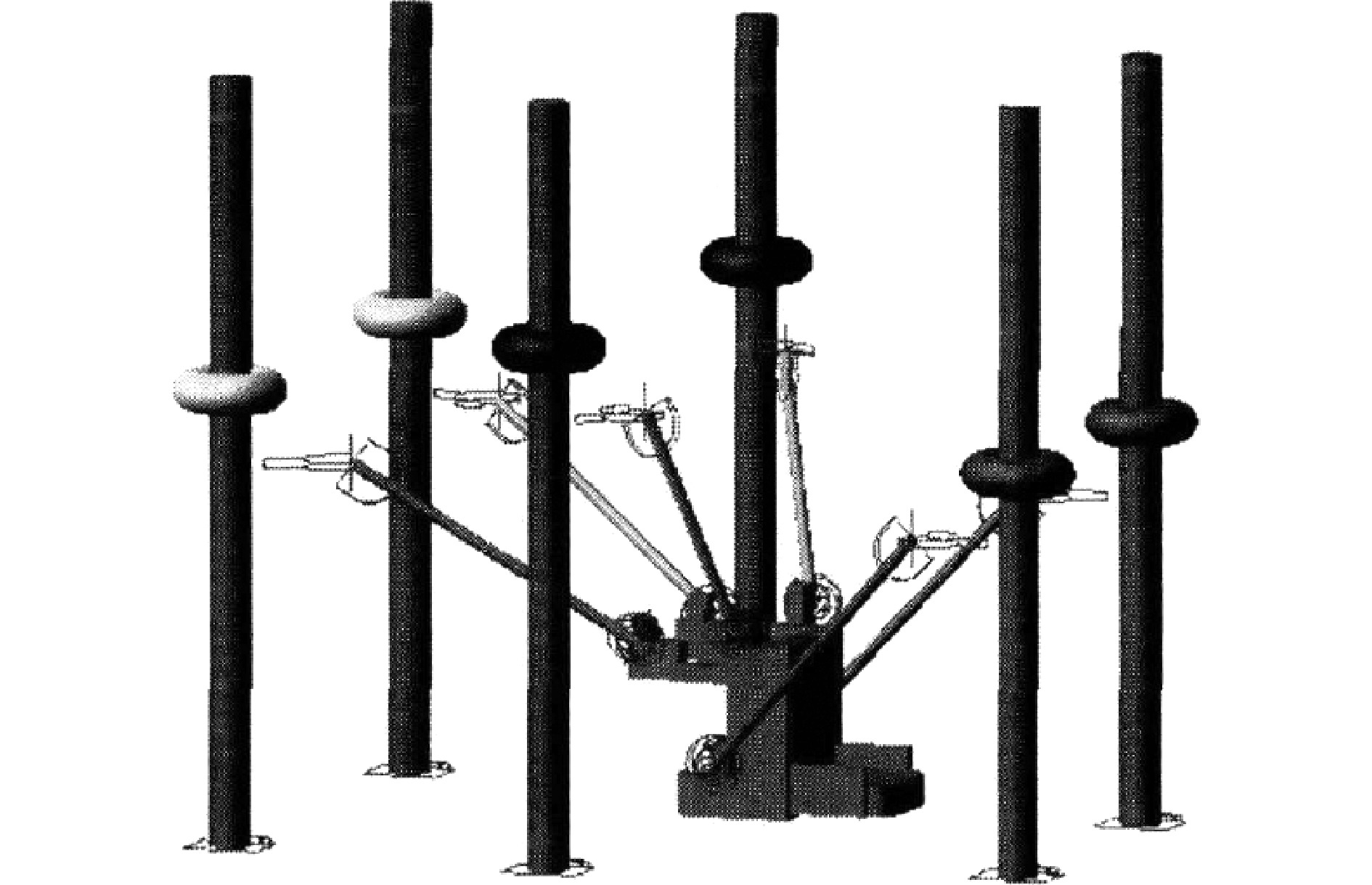
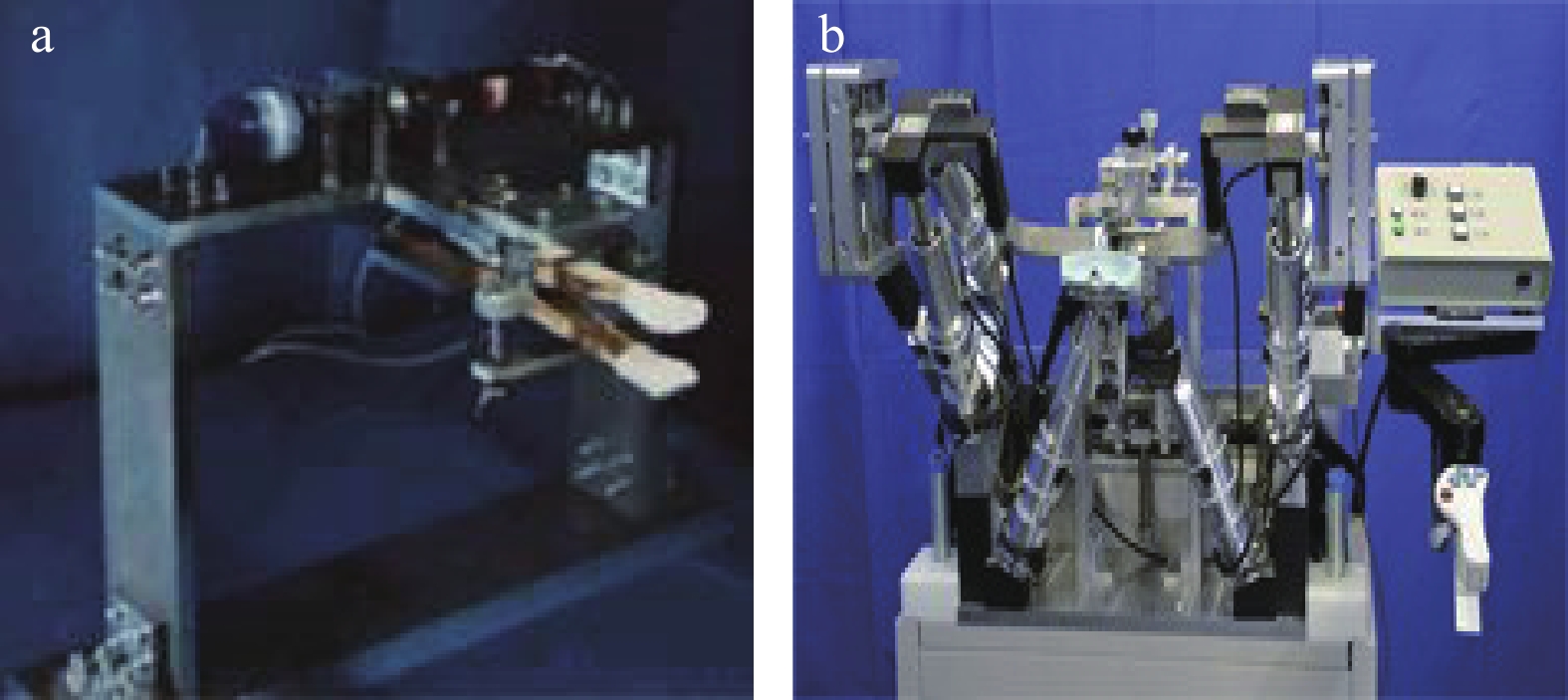
自1986年至2004年期间,日本早稻田大学团队研究人员[50-53]针对颚骨运动障碍患者设计了WY系列(Waseda–Yamanashi)和WJ系列(Waseda Jaw)模拟仪器,并对其进行升级改良。其研究人员开发出的WY-1装置是最早的下颚模拟装置之一(如图16a所示),利用简单机械装置模仿出下颚对下颚关节的旋转运动[54]。并于2004年该系列设备升级到WY-5RVI型(如图16b所示),引入新型三自由度系统,配备EMG系统,配备实时检测程序,能够更快更准确的检测到患者的下颚变化情况。
![]()
4. 咀嚼模拟器测试方法比较
咀嚼模拟器运行性能主要的测试验证依据是真实口腔咀嚼参数,包括咀嚼过程中的运动参数、压力参数、温度参数、pH参数、电导率参数等,将测试得到的参数与实际人体咀嚼过程中测得参数进行比较,若结果之间无明显差异,则可说明设备的硬件性能达到仿生程度所需标准。除实验参数外,将咀嚼模拟器应用于实验测量后得出的结果参数对咀嚼模拟器性能的仿真程度也具有很好的参考价值,包括咀嚼效率、d50(样品破碎后颗粒累计粒度分布百分数达到50%时所对应的颗粒粒径)等。
通常追求高仿生度的机械设计研究人员侧重于硬件性能的仿真程度是否达到真实人体参数要求,而从事食品及其质地研究人员更注重于咀嚼模拟器应用于实际实验操作后是否能达到人体的实际测试结果参数。所以不同咀嚼模拟器对应测试方法也有所不同,以下对不同测试方法进行总结分类,方便相关研究人员借鉴参考。
4.1 设备硬件测试方法
4.1.1 虚拟样机测试法
虚拟样机测试方法可以实现在装置未搭建前对咀嚼模拟器的运动状态进行检测,缩短实验时间和减少实验经费,提高实验效率。但对于软件和计算机技术要求较高,对食品及医学领域研究人员来说较难实现完成,通常由计算机或机械领域研究人员完成测试。
4.1.1.1 Simscape Multibody 运动仿真系统
电子科技大学谢俊明[27]借助Simscape Multibody 运动仿真系统对开发的咀嚼模拟器进行模拟测试,该模块来自于Matlab中的Simscape建模用工具箱,通常应用于各种机械结构的模块构建以及运动的模拟仿真。该程序可避免繁琐数学公式推导过程,可直接将在Matlab中构建的3D模型导入,程序会将模型自动转化为相应的程序模块。最为特殊的是可以用于设备在设计完成后的3D动画演示,可较为直观的看出设备构建情况。再将设备运动情况和体内数据相比较,验证其合理性。
3D模拟情况如图17所示,通过演示可看出不同状态下咀嚼模拟器的工作情况,可通过参数程序对运行过程中装置进行控制,直观反映出下颌变化的速度和位移数值。
![]() 图 17 咀嚼模拟器运动状态3D演示图注: a:2.5 s 时;b:7.5 s时[27]。Figure 17. 3D demonstration diagram of masticatory simulator movement state
图 17 咀嚼模拟器运动状态3D演示图注: a:2.5 s 时;b:7.5 s时[27]。Figure 17. 3D demonstration diagram of masticatory simulator movement state4.1.1.2 ADAMS仿真软件
大连理工大学宋佳[31]利用ADAMS软件对咀嚼模拟器设备进行仿真测试,具体模拟情况如图18所示。利用该软件自身的数据库对机械系统进行几何建模,同时满足操作者的参数化设计。在软件内构建出设计好的模型后通过输入运动模拟轨迹和力学参数对设备运行进行模拟,可通过模拟反映出设备所需驱动力是否符合要求。
虚拟样机测试方法虽能够有效节省时间和经费,但机械装置在组装过程中或多或少具有一定的误差,对精密仪器来说,小的误差也会引起实验数据结果的巨大差异。所以虚拟测试方法最终只能作为设备构建测试的参考数据,搭建后装置的测试是必不可少的。
4.1.2 运动参数测试法
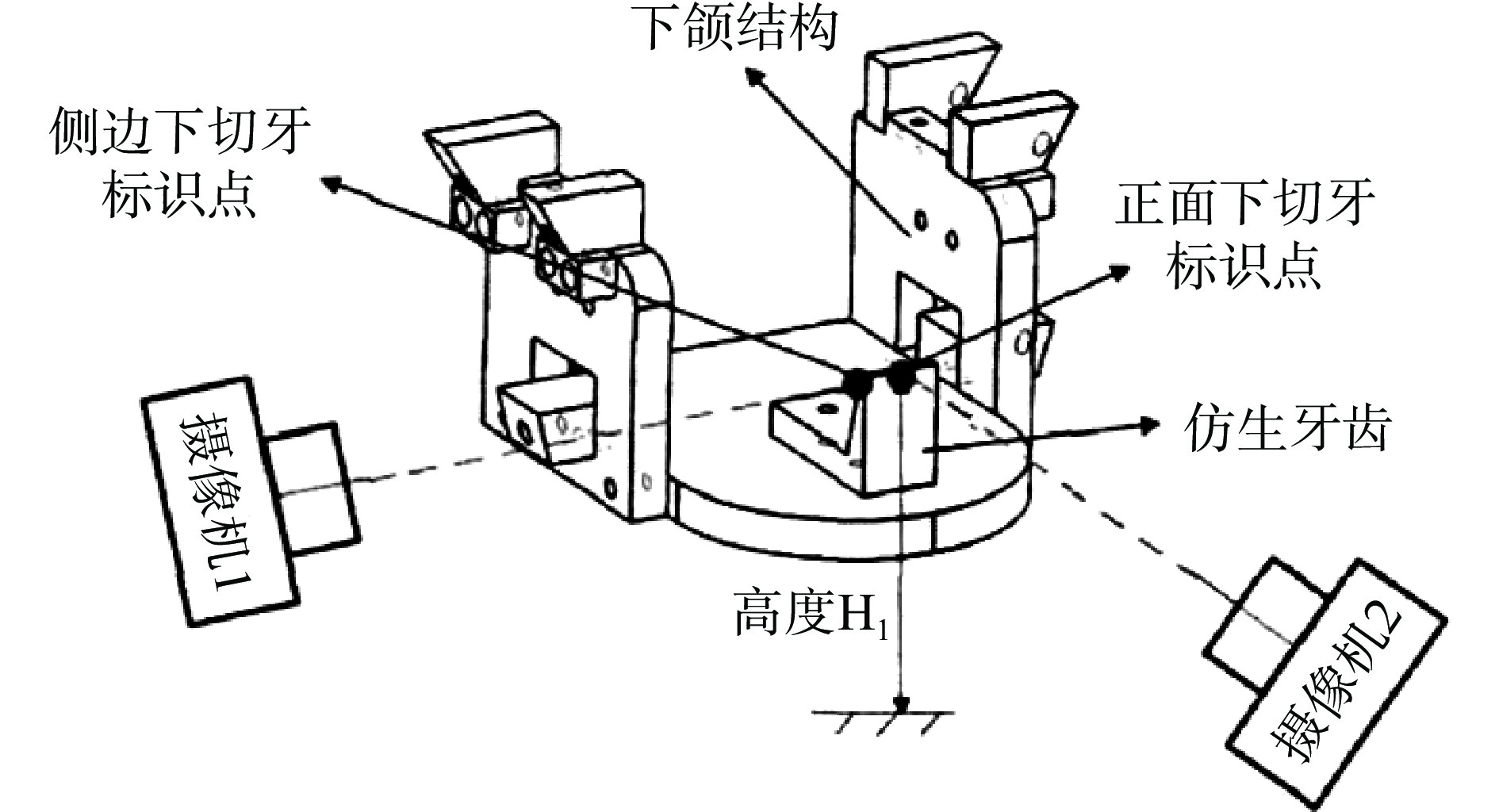
大连理东大学温海营[33]借助视觉和力信号传感器对搭建后的设备运动状态和受力情况进行采集。利用标识点对仿生牙齿进行标记,并将其放置于下颌的中心位置。于设备正前方和正侧方放置摄像机,利用摄像机记录下装置的完整运动轨迹,如图19所示。利用Matlab软件对其进行逐帧分析,绘制出运动轨迹曲线,并和设计曲线相比较,进行检验。利用力传感器测量咬合力和关节受力,同样和设计中数据相比较,进行验证。
![]()
4.2 实验结果参数测试
用于食品领域研究咀嚼模拟器大多采用真实食品材料进行仪器的真实性测试,通常会和体内实验数据进行比较,用来验证人工咀嚼装置能够在体外产生与人口腔内生产相似的食团。真实材料测试通常分为两个部分——体内和体外实验。
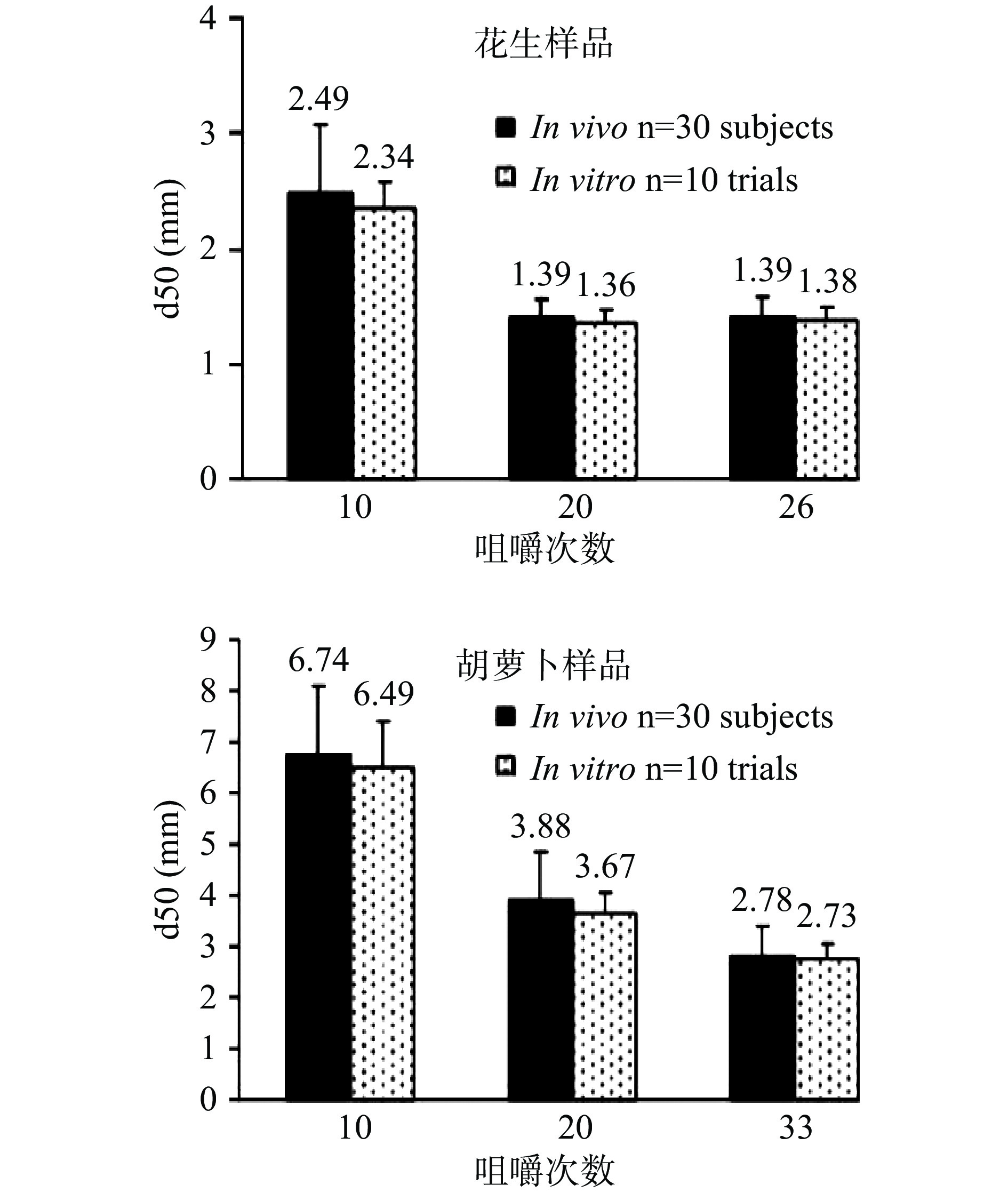
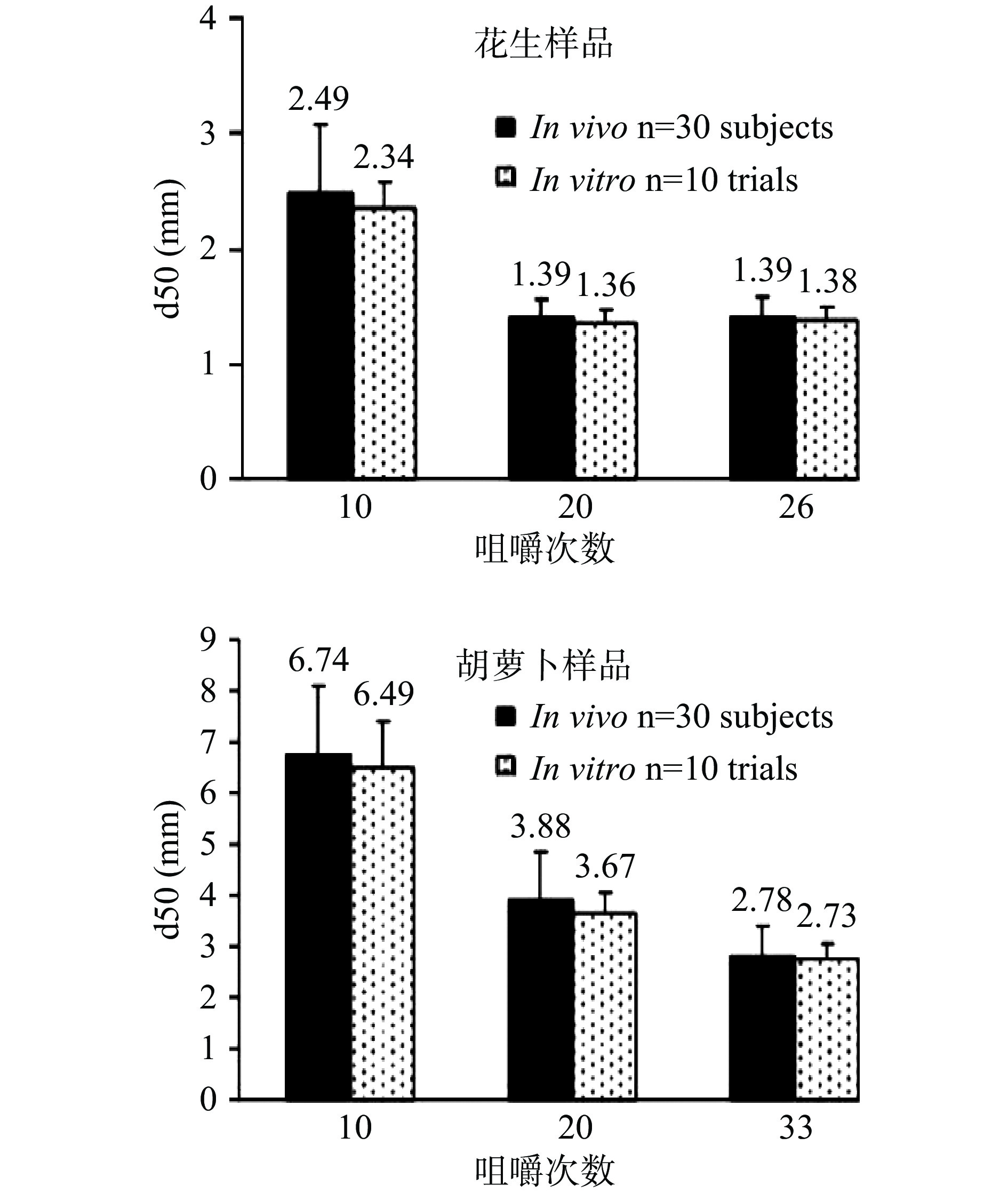
Peyron等[35]就研发出的AM2咀嚼模拟器进行体内外对比实验,验证仪器能够真实模拟人体的咀嚼作用效果。研究人员通过招募志愿者并进行食物样品咀嚼实验,实验共分为三轮,最终得到志愿者达到吞咽阈值的平均咀嚼次数,并将该平均数作为体外咀嚼模拟器模拟咀嚼参考次数之一,最终选定体内外咀嚼次数为:花生:10、20、26次;胡萝卜:10、20、33次。
体外实验采用体内实验得到的循环咀嚼次数以及测试得到的咀嚼咬合力数值进行模拟。最终将体内外实验所得到的食团进行粒径扫描分析并进行颗粒大小分析测试,结果如图20所示。
![]()
结果证明体内外结果从平均粒径大小角度分析并无明显差距,证明了设备的真实可行性。
5. 结语与展望
本文在尽可能收集目前已成功研制的咀嚼模拟器信息基础上,对现有的设备进行了简单的分析,并做了如下工作:a.对咀嚼模拟器的硬件基础——口腔生理环境及软件基础——咀嚼动力系统进行简单介绍并分析其体外模拟方法;b.对不同领域咀嚼模拟器按其侧重点进行简单分类和介绍,针对其研究方向提出部分见解,方便不同领域研究人员进行了解与选择;c.选取几种具有代表性的咀嚼模拟器测试方法做出介绍,并对不同领域咀嚼模拟器测试做出总结。
咀嚼模拟器设备应用的多领域性是其快速发展的重要原因。机械领域研究人员通过机械本身的运作方式反映出机械的仿生程度,并对机械的精度和接触方式等作出改良。计算机领域研究人员更关注设备软件对机械控制的精确度,通过改良软件的功能性和可操作性提高设备的灵敏度。而食品领域研究人员更注重机械的准确度对实验结果造成的影响,所以食品研究领域对咀嚼模拟器性能的检测更多的是从人体实验结果和体外实验结果的比较入手,设立一定评判标准,若两者达到相同标准则认定设备的准确性。
在多学科领域合作发展的背景下,咀嚼模拟器未来将在以模拟口腔咀嚼为原理的基础上开展多仪器联用研究,包括电子舌、人工鼻、体外消化系统、风味物质分析系统等,在尊重伦理道德的基础上有望实现人体对食品消化吸收的全流程模拟和分析。摆脱过去单纯利用仪器对食品加工过程进行理化分析,而忽视人体和食品之间的密切联系的研究方法。最终将研究结果作用于食品开发与改进,真正意义上实现健康的食品更可口,可口的食品更健康[1]。
-
![]()
![]()
![]()
图 4 六杆连接型咀嚼模拟器设备示意图
注:a:仪器展示图;b:下颚运动轨迹示意图[28]。
Figure 4. Schematic diagram of six-bar connection type masticatory simulator equipment
![]()
![]()
图 6 大连理工大学的咀嚼模拟器设计
注:a:模拟下颌运动示意图;b:咀嚼模拟器三维模型[33]。
Figure 6. The masticatory simulatordesign of Dalian University of Technology
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
图 17 咀嚼模拟器运动状态3D演示图
注: a:2.5 s 时;b:7.5 s时[27]。
Figure 17. 3D demonstration diagram of masticatory simulator movement state
![]()
-
[1] 陈建设, 王鑫淼. 食品口腔加工研究的发展与展望[J]. 中国食品学报,2018,18(9):1−7. [CHEN Jianshe, WANG Xinmiao. Development and prospect of food oral processing research[J]. Journal of Chinese Institute of Food Science and Technology,2018,18(9):1−7. [2] XU W L, BRONLUND J E, POTGIETER J, et al. Review of the human masticatory system and masticatory robotics[J]. Mechanism & Machine Theory,2008,43(11):1353−1375.
[3] CHEN B, XU W, DHUPIA J, et al. Opportunities and challenges in developing a next generation masticatory robot[C]// 2017 24th International Conference on Mechatronics and Machine Vision in Practice (M2VIP). IEEE, 2017.
[4] CHEN J. Food oral processing—A review[J]. Food Hydrocolloids,2009,23(1):1−25. doi: 10.1016/j.foodhyd.2007.11.013
[5] HIIEMAE K. Mehanisms of food reduction, transport and deglutition: How the texture of food affects feeding behavior[J]. Journal of Texture Studies,2010,35(2):171−200.
[6] AlSANEI W A, CHEN J. Studies of the oral capabilities in relation to bolus manipulations and the ease of initiating bolus flow[J]. Journal of Texture Studies,2014,45(1):1−12. doi: 10.1111/jtxs.12041
[7] PANDA S, CHEN J, BENJAMIN O. Development of model mouth for food oral processing studies: Present challenges and scopes[J]. Innovative Food Science & Emerging Technologies,2020,66(1):102524.
[8] CATE A T. Oral histology: Development, structure, and function[M]. Mosby, 2007.
[9] STRAIT S G. Tooth use and the physical properties of food[J]. Evolutionary Anthropology: Issues, News, and Reviews, 1997, 5(6) : 199-211.
[10] JA Kieser, MG Farland, HANNAH Jack, et al. The role of oral soft tissues in swallowing function: What can tongue pressure tell us?[J]. Australian Dental Journal, 2013, 59(1): 155-161.
[11] KIESER J, BOLTER C, RANIGA N, et al. Tongue–palate interactions during swallowing[J]. Journal of Texture Studies,2011,42(2):95−102. doi: 10.1111/j.1745-4603.2010.00274.x
[12] IMAI A, TANAKA M, TATSUTA M, et al. Ultrasonographic images of tongue movement during mastication[J]. Journal of Osaka Dental University,1995,29(2):61−69.
[13] OKADA A, HONMA M, NOMURA S, et al. Oral behavior from food intake until terminal swallow[J]. Physiology & Behavior,2007,90(1):172−179.
[14] MATSUO K, PALMER J B. Oral phase preparation and propulsion: Anatomy, physiology, rheology, mastication, and transport[M]. Springer New York, 2013.
[15] KENNEDY D, KIESER J, BOLTER C, et al. Tongue pressure patterns during water swallowing[J]. Dysphagia,2010,25(1):11−19. doi: 10.1007/s00455-009-9223-2
[16] BOEHLKE C, ZIERAU O, HANNIG C. Salivary amylase-The enzyme of unspecialized euryphagous animals[J]. Archives of Oral Biology,2015,60(8):1162−1176. doi: 10.1016/j.archoralbio.2015.05.008
[17] LIU J, DUAN Y. Saliva: A potential media for disease diagnostics and monitoring[J]. Oral Oncology,2012,48(7):569−577. doi: 10.1016/j.oraloncology.2012.01.021
[18] LEVINE M J, AGUIRRE A, HATTON M N, et al. Artificial salivas: Present and future[J]. Journal of Dental Research,1987,66(2_Suppl):693−8. doi: 10.1177/00220345870660S215
[19] 汪声明, 吴尧, 史新连, 等. 西维美林联合人工唾液治疗舍格伦综合征患者口腔黏膜病损的疗效[J]. 南昌大学学报(医学版),2021,61(2):59−63. [WANG Shuoming, WU Yao, SHI Xinlian, et al. Efficacy of sevimeline combined with artificial saliva in the treatment of oral mucosal lesions in patients with shegren syndrome[J]. Journal of Nanchang University (Medical Science),2021,61(2):59−63. [20] GAL J A, GALLO L M, PALLA S, et al. Analysis of human mandibular mechanics based on screw theory and in vivo data[J]. Journal of Biomechanics,2004,37(9):1405−1412. doi: 10.1016/j.jbiomech.2003.12.019
[21] T Ogawa, M Ogawa, K Koyano. Different responses of masticatory movements after alternation of occlusal guidance related to individual movement pattern[J]. Oral Rehab, 28(2001): 830–841.
[22] 王建超, 梁锐英, 吴文慧. 咀嚼肌肌电图在口腔研究领域的应用[J]. 当代医学,2010,16(3):21−22. [WANG Jianchao, LIANG Ruiying, WU Wenhui. Application of masticatory muscle electromyography in oral research[J]. Contemporary Medicine,2010,16(3):21−22. doi: 10.3969/j.issn.1009-4393.2010.03.011 [23] WANG X, ZHENG G, SU M, et al. Biting force and tongue muscle strength as useful indicators for eating and swallowing capability assessment among elderly patients[J]. Food Science and Human Wellness, 2019, 8(2): 149-155.
[24] LUND J P. Mastication and its control by the brain stem[J]. Critical Reviews in Oral Biology & Medicine An Official Publication of the American Association of Oral Biologists,1991,2(1):33.
[25] OLIVER Röhrle, PULLAN A J. Three-dimensional finite element modelling of muscle forces during mastication[J]. Journal of Biomechanics,2007,40(15):3363−3372. doi: 10.1016/j.jbiomech.2007.05.011
[26] TAKANOBU H, TAKANISHI A, KATO I. Design of a mastication robot mechanism using a human skull model[C]// Intelligent Robots and Systems'93, IROS'93. Proceedings of the 1993 IEEE/RSJ International Conference on. IEEE, 1993: 203-208.
[27] 谢俊明. 仿生咀嚼机器人运动仿真及控制系统设计[D]. 成都: 电子科技大学, 2020. XIE Junming. Motion simulation and control system design of bionic chewing robot[D]. Chengdu: University of Electronic Science and Technology of China, 2020.
[28] XU W L, LEWIS D, BRONLUND J E, et al. Mechanism, design and motion control of a linkage chewing device for food evaluation[J]. Mechanism & Machine Theory,2008,43(3):376−389.
[29] 刘同占. 仿下颌运动机器人设计及仿生性能研究[D]. 大连: 大连理工大学, 2012. LIU Tongzhan. Design and bionic performance of mandibular motion robot[D]. Dalian: Dalian University of Technology, 2012.
[30] 杜婧. 仿下颌运动机器人的样机设计和实验研究[D]. 大连: 大连理工大学, 2014. DU Jing. Prototype design and experimental research of mandibular motion robot [D]. Dalian: Dalian University of Technology, 2014.
[31] 宋佳. 仿下颌运动并联机器人的性能分析与参数优化[D]. 大连: 大连理工大学, 2013. SONG Jia. Performance analysis and parameter optimization of jaw like parallel robot [D]. Dalian: Dalian University of Technology, 2013.
[32] 温海营, 丛明, 王贵飞, 等. 冗余驱动仿下颌运动机器人工作空间分析及试验验证[J]. 机器人,2015(3):32−43. [WEN Haiying, CONG Ming, WANG Guifei, et al. Workspace analysis and experimental verification of redundant driven mandibular motion robot[J]. Robot,2015(3):32−43. [33] 温海营. 含点接触高副的冗余驱动仿生咀嚼机器人研究[D]. 大连: 大连理工大学, 2016, 20−35. WEN Haiying. Research on redundant driven bionic chewing robot with point contact high pair [D]. Dalian: Dalian University of Technology, 2016, 20−35.
[34] WODA A, MISHELLANY-DUTOUR A, BATIER L, et al. Development and validation of a mastication simulator[J]. Journal of Biomechanics,2010,43(9):1667−1673. doi: 10.1016/j.jbiomech.2010.03.002
[35] PEYRON M A, SANTE-LHOUTELLIER V, DARDEVET D, et al. Addressing various challenges related to food bolus and nutrition with the AM~2 mastication simulator[J]. Food Hydrocolloids,2019,97(Dec.):105229.1−105229.11.
[36] MISHELLANY-DUTOUR A, PEYRON M A, CROZE J, et al. Comparison of food boluses prepared in vivo and by the AM2 mastication simulator[J]. Food Quality & Preference,2011,22(4):326−331.
[37] CHANG W L. Design of a mastication robot of lead screw and Scotch-Yoke actuation[J]. Dissertations & Theses-Gradworks, 2012.
[38] LEE S J, KIM B K, CHUN Y G, et al. Design of mastication robot with life-sized linear actuator of human muscle and load cells for measuring force distribution on teeth[J]. Mechatronics,2018,51:127−136. doi: 10.1016/j.mechatronics.2017.11.013
[39] MACKLEY M R, TOCK C, ANTHONY R, et al. The rheology and processing behavior of starch and gum-based dysphagia thickeners[J]. Journal of Rheology,2013,57(6):1533. doi: 10.1122/1.4820494
[40] NOH Y, SEGAWA M, SATO K, et al. Development of a robot which can simulate swallowing of food boluses with various properties for the study of rehabilitation of swallowing disorders[C]// IEEE International Conference on Robotics & Automation. IEEE, 2011: 4676-4681.
[41] STADING M, WAQAS M Q, HOLMBERG F, et al. A device that models human swallowing[J]. Dysphagia,2019,34(1):1−12. doi: 10.1007/s00455-018-09967-4
[42] 韩敬虎. 咀嚼吞咽一体化仿生机器人研究[D]. 无锡: 江南大学, 2016 HAN Jinghu. Research on integrated bionic robot for chewing and swallowing[D]. Wuxi: Jiangnan University, 2016.
[43] 刘俊辉, 张建勋, 宗永立. 食品香味释放[J]. 化学通报,2010,73(12):1099−1105. [LIU Junhui, ZHANG Jianxun, ZONG Yongli. Food flavor release[J]. Chemistry Bulletin,2010,73(12):1099−1105. [44] SALLES C, TARREGA A, MIELLE P, et al. Development of a chewing simulator for food breakdown and the analysis of in vitro flavor compound release in a mouth environment[J]. Journal of Food Engineering,2015,82(4):189−98.
[45] KRISTIAWAN M, VALLE G D, AL Réguerre, et al. Artificial oral processing of extruded pea flour snacks[J]. Food Engineering Reviews,2020(2):1−15.
[46] TARREGA A, YVEN C, SEMON E, et al. Effect of oral physiology parameters on in-mouth aroma compound release using lipoprotein matrices: An in vitro approach[J]. Foods,2019,8(3):106. doi: 10.3390/foods8030106
[47] 孙钟雷. 基于咀嚼模拟的食品质地评价研究[D]. 长春: 吉林大学, 2012 SUN Zhonglei. Evaluation of food texture based on chewing simulation[D]. Changchun: Jilin University, 2012.
[48] HASHIMOTO T, SENDA M, SHIIBA T, et al. Development of the interactive receptionist system by the face robot[J]. SICE Annual Conference Program and Abstracts,2004:67.
[49] FLORES E, FELS S, VATIKIOTIS-BATESON E. Chew on this: Design of a 6DOF anthropomorphic robotic jaw[C]// Robot and Human interactive Communication, 2007. RO-MAN 2007. The 16th IEEE International Symposium on. IEEE, 2007: 648-653.
[50] TAKANOBU H, MARUYAMA T, TAKANISHI A, et al. Mouth opening and closing training with 6-DOF parallel robot[C]// Proceedings of the 2000 IEEE International Conference on Robotics and Automation, San Francisco, April 2000: 1384–1389.
[51] TAKANOBU H, OHTSUKI K, TAKANISHI A, et al. Jaw training robot and its clinical results[C]// Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), 2003: 932–937.
[52] OKINO A, INOUE T, TAKANOBU H, et al. A clinical jaw movement training robot for lateral movement training[C]// Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003: 244–249.
[53] TAKANOBUL H, YAJIMA T, NAKAZAWA M, et al. Quantification of masticatory efficiency with a mastication robot[C]// Proceedings of the IEEE Internal Conference on Robotics and Automation, 1998: 1635–1640.
[54] TAKANISHI A, TANASE T, KUMEI M, et al. Development of 3 DOF jaw robot WJ-2 as a human's mastication simulator[C]// Proceedings of Fifth International Conference on Advanced Robotics, Pisa, 1991: 277–282.
 下载:
下载:





 下载:
下载:




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
